 卡尔曼滤波的MATLAB实现Word格式.doc
卡尔曼滤波的MATLAB实现Word格式.doc
- 文档编号:14177395
- 上传时间:2022-10-19
- 格式:DOC
- 页数:8
- 大小:791.50KB
卡尔曼滤波的MATLAB实现Word格式.doc
《卡尔曼滤波的MATLAB实现Word格式.doc》由会员分享,可在线阅读,更多相关《卡尔曼滤波的MATLAB实现Word格式.doc(8页珍藏版)》请在冰豆网上搜索。
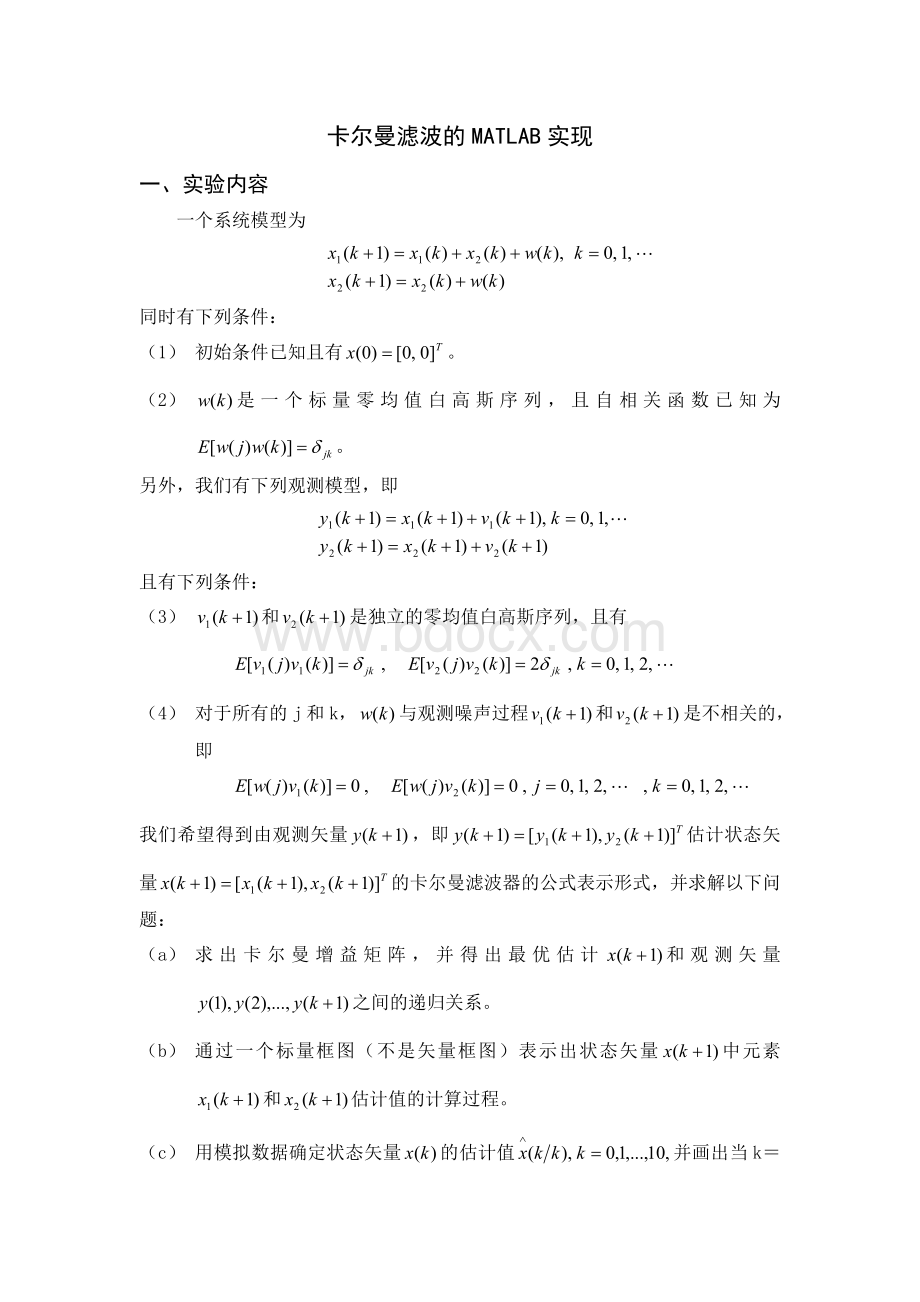
(a)求出卡尔曼增益矩阵,并得出最优估计和观测矢量之间的递归关系。
(b)通过一个标量框图(不是矢量框图)表示出状态矢量中元素和估计值的计算过程。
(c)用模拟数据确定状态矢量的估计值并画出当k=0,1,…,10时和的图。
(d)通常,状态矢量的真实值是得不到得。
但为了用作图来说明问题,表P8.1和P8.2给出来状态矢量元素得值。
对于k=0,1,…,10,在同一幅图中画出真实值和在(c)中确定的的估计值。
对重复这样过程。
当k从1变到10时,对每一个元素i=1,2,计算并画出各自的误差图,即。
(e)当k从1变到10时,通过用卡尔曼滤波器的状态误差协方差矩阵画出和,而,。
(f)讨论一下(d)中你计算的误差与(e)中方差之间的关系。
二、实验原理
1、卡尔曼滤波简介
卡尔曼滤波是解决以均方误差最小为准则的最佳线性滤波问题,它根据前一个估计值和最近一个观察数据来估计信号的当前值。
它是用状态方程和递推方法进行估计的,而它的解是以估计值(常常是状态变量的估计值)的形式给出其信号模型是从状态方程和量测方程得到的。
卡尔曼过滤中信号和噪声是用状态方程和测量方程来表示的。
因此设计卡尔曼滤波器要求已知状态方程和测量方程。
它不需要知道全部过去的数据,采用递推的方法计算,它既可以用于平稳和不平稳的随机过程,同时也可以应用解决非时变和时变系统,因而它比维纳过滤有更广泛的应用。
2、卡尔曼滤波的递推公式
………
(1)
………
(2)
………(3)
………(4)
3、递推过程的实现
如果初始状态的统计特性及已知,并
令
又
将代入式(3)可求得,将代入式
(2)可求得,将此代入式
(1)可求得在最小均方误差条件下的,同时将代入式(4)又可求得;
由又可求,由又可求得,由又可求得,同时由与又可求得……;
以此类推,这种递推计算方法用计算机计算十分方便。
三、MATLAB程序
%卡尔曼滤波实验程序
clc;
y1=[3.29691969,3.38736515,7.02830641,9.71212521,11.42018315,15.97870583,22.06934285,28.30212781,30.44683831,38.75875595];
%观测值y1(k)
y2=[2.10134294,0.47540797,3.17688898,2.49811140,2.91992424,6.17307616,5.42519274,3.05365741,5.98051141,4.51016361];
%观测值y2(k)
p0=[1,0;
0,1];
p=p0;
%均方误差阵赋初值
Ak=[1,1;
%转移矩阵
Qk=[1,0;
%系统噪声矩阵
Ck=[1,0;
%量测矩阵
Rk=[1,0;
0,2];
%测量噪声矩阵
x0=[0,0]'
;
xk=x0;
%状态矩阵赋初值
fork=1:
10
Pk=Ak*p*Ak'
+Qk;
%滤波方程3
Hk=Pk*Ck'
*inv(Ck*Pk*Ck'
+Rk);
%滤波方程2
yk=[y1(k);
y2(k)];
%观测值
xk=Ak*xk+Hk*(yk-Ck*Ak*xk);
%滤波方程1
x1(k)=xk
(1);
x2(k)=xk
(2);
%记录估计值
p=(eye
(2)-Hk*Ck)*Pk;
%滤波方程4
pk(:
k)=[p(1,1),p(2,2)]'
%记录状态误差协方差矩阵
end
figure%画图表示状态矢量的估计值
subplot(2,1,1)
i=1:
10;
plot(i,x1(i),'
k'
)
h=legend('
x1(k)的估计值'
set(h,'
interpreter'
'
none'
subplot(2,1,2)
plot(i,x2(i),'
x2(k)的估计值'
X1=[0,1.65428714,3.50300702,5.997852924,9.15040740,12.50873910,16.92192594,21.34483352,25.89335144,31.54135330,36.93605670];
%由模拟得到的实际状态值X1(k)
X2=[0,1.65428714,1.84871988,2.47552222,3.17187816,3.35833170,4.41318684,4.42290758,4.54851792,5.64800186,5.394470340];
%由模拟得到的实际状态值X2(k)
figure%在同一幅图中画出状态矢量的估计值与真实值
i,X1(i+1),'
b'
x1(k)的真实值'
i,X2(i+1),'
x2(k)的真实值'
fori=1:
10%计算x(k)的误差
e1(i)=X1(i+1)-x1(i);
e2(i)=X2(i+1)-x2(i);
figure%画出误差图
plot(i,e1(i),'
r'
x1(k)的误差'
plot(i,e2(i),'
x2(k)的误差'
figure%通过用卡尔曼滤波器的状态误差协方差矩阵画出E[ε1(k/k)^2]和E[ε2(k/k)^2]
plot(i,pk(1,i),'
h=legend('
由状态误差协方差矩阵得到的E[ε1(k/k)^2]'
Interpreter'
plot(i,pk(2,i),'
h=legend('
由状态误差协方差矩阵得到的E[ε2(k/k)^2]'
四、实验结果分析
(a)卡尔曼增益矩阵:
估计值与观测值之间的递归关系为:
(b)状态矢量估计值的计算框图:
+
(c)和的图:
(d)真实值与估计值的比较图:
各自的误差图:
(e)通过用卡尔曼滤波器的状态误差协方差矩阵画出的和:
(f)分析:
(e)中的方差是(d)中的误差平方后取均值,是均方误差。
误差直接由真实值减去估计值,有正有负,而均方误差没有这个缺陷,更能综合的表示滤波的效果。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 卡尔 滤波 MATLAB 实现
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 12处方点评管理规范实施细则_精品文档.doc
12处方点评管理规范实施细则_精品文档.doc
-
12核心制度竞赛题库_精品文档.doc
-
12新医疗技术准入制度_精品文档.docx
-
12月份医务科质控通报_精品文档.doc
-
12项基本公共卫生服务项目_精品文档.docx
-
12月环境卫生学监测方法考核试题_精品文档.doc
-
13双重预防体系风险评价制度及准则_精品文档.doc
-
12种不能忽视的可能的心脏病症状_精品文档.doc
-
13检验科“三基”考试试卷_精品文档.doc
-
14以预防为先导_精品文档.doc
-
12高危药品分级管理制度及目录_精品文档.doc
-
13个病种中医护理方案_精品文档.docx
-
16检验科应对突发事件应急预案_精品文档.docx
-
12急救药品管理制度_精品文档.doc
 17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
-
14医疗器械召回程序_精品文档.wps
-
13医用耗材库房管理制度_精品文档.doc
-
136个幼儿园英语课堂游戏_精品文档.docx
-
12经络彩图_精品文档.doc
-
151颅脑损伤恢复期康复临床路径_精品文档.doc
-
14项护理核心制度_精品文档.doc
-
12检验科化学危险物品使用准则_精品文档.doc
-
15-消化内镜手术分级目录_精品文档.xls
-
13术前讨论记录本模板_精品文档.doc
-
17-下腰痛评估表JOAVAPS_精品文档.doc
-
12项基本公共卫生服务流程图_精品文档.doc
-
13中国髋膝关节置换的现状及展望_精品文档.docx
-
14种最迷惑人的癌症前兆_精品文档.docx
-
17消毒供应室医院感染管理制度_精品文档.doc
-
15附加住院津贴保险条款的费率-人保财险备-健康附号_精品文档.doc
-
19陕西省崔家沟监狱罪犯医疗防疫总站突发事件预案_精品文档.doc
-
20项护理技术操作规程及评分标准_精品文档.doc
-
七年级生物下册 第9章 地面上的生物93地面上丰富的生物资源教案 苏科版.docx
-
七年级英语 Microsoft Word 文档.docx
-
企业发展演讲稿.docx
-
写事的作文800字.docx
-
企业所得税月季度预缴纳税申报表A类填表说明.docx
-
新概念裕兴2 lesson1.docx
-
新建仓库施工组织设计.docx
-
钳工技能比武心得体会.docx
-
浅谈电子商务的发展.docx
-
新增存栏头奶牛养殖场项目可行性研究报告.docx
-
强烈推荐版分析报告智能制造行业分析报告完美精编.docx
-
青少年弱势群体思想政治教育论析当今我国青少年教育的重要课题硕士学位论文.docx
-
区委办公室领导班子思想整治建设汇报材料.docx
-
全第二次全国污染源普查实施方案.docx
-
药物化学考试复习题.docx
-
人教版八年级英语上册15单元知识点词汇句型固定搭配.docx
-
小学一年级美术教案.docx
-
液压挖掘机zw5570.docx
-
医院职工代表述职报告范文.docx
