 PLSYPLSRPLSVDRVIDRVA指令Word文档格式.docx
PLSYPLSRPLSVDRVIDRVA指令Word文档格式.docx
- 文档编号:13892481
- 上传时间:2022-10-14
- 格式:DOCX
- 页数:9
- 大小:655.28KB
PLSYPLSRPLSVDRVIDRVA指令Word文档格式.docx
《PLSYPLSRPLSVDRVIDRVA指令Word文档格式.docx》由会员分享,可在线阅读,更多相关《PLSYPLSRPLSVDRVIDRVA指令Word文档格式.docx(9页珍藏版)》请在冰豆网上搜索。
DRVI相对位置控制指令。
一、脉冲输出指令(包括PLSY,PLSR和PLSR):
可以应用高速点和普通点
1、PLSY
指令使用中可以设置单个输出点以一定的频率发出目标值个脉冲,在指令中可以设置脉冲频率、脉冲总数、和发出脉冲的输出点;
但只能控制脉冲,如果是脉冲加方向的脉冲模式,那方向点要另选一个普通开关点另外控制。
方向信号先于脉冲指令给定。
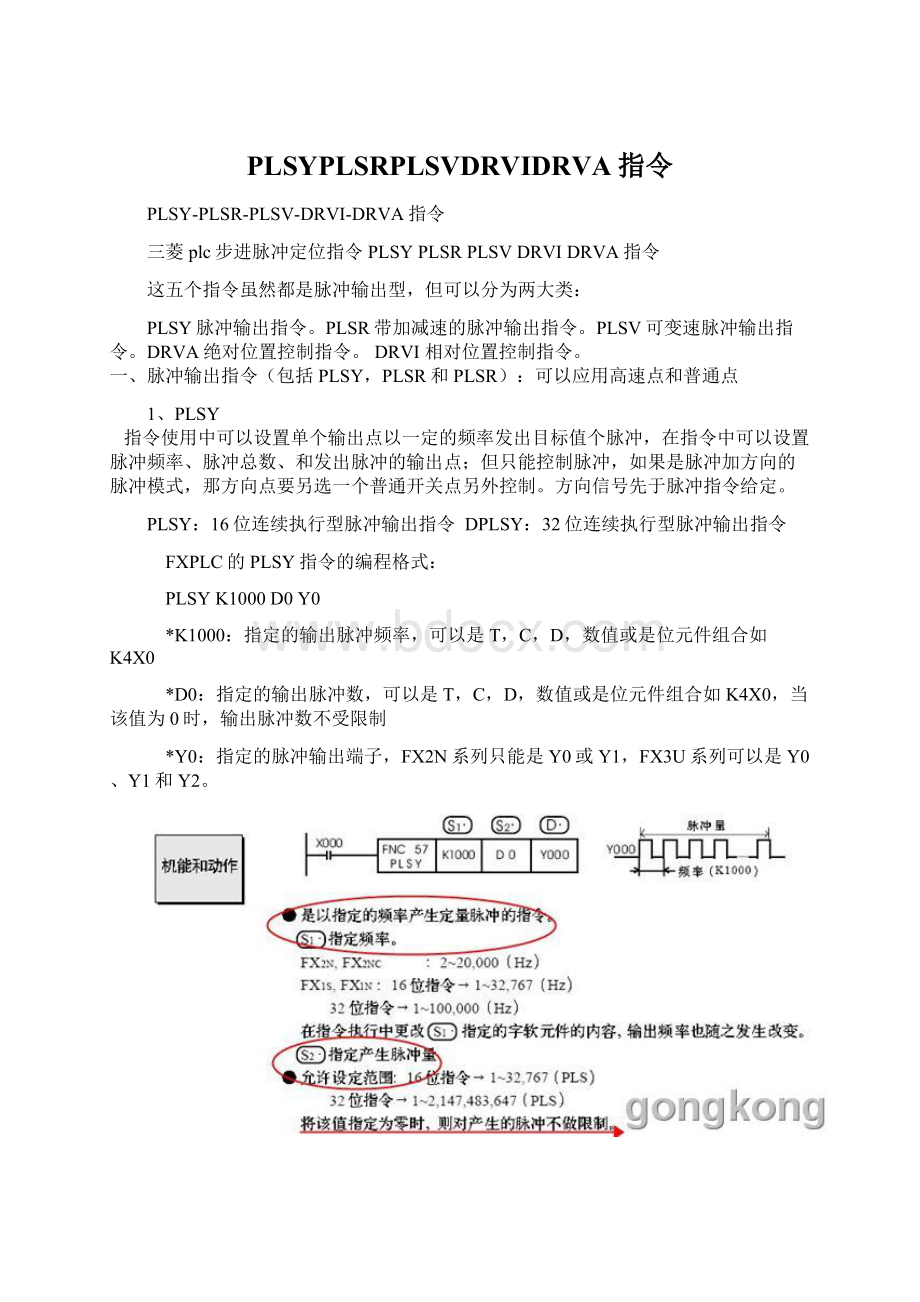
PLSY:
16位连续执行型脉冲输出指令
DPLSY:
32位连续执行型脉冲输出指令
FXPLC的PLSY指令的编程格式:
PLSYK1000D0Y0
*K1000:
指定的输出脉冲频率,可以是T,C,D,数值或是位元件组合如K4X0
*D0:
指定的输出脉冲数,可以是T,C,D,数值或是位元件组合如K4X0,当该值为0时,输出脉冲数不受限制
*Y0:
指定的脉冲输出端子,FX2N系列只能是Y0或Y1,FX3U系列可以是Y0、Y1和Y2。
程序示例
注意D8140的作用:
小例:
LDM10
PLSYD0D10Y1
当M10闭合时,以D0指定的脉冲频率从Y1输出D10指定的脉冲数;
在输出过程中M10断开,立即停止脉冲输出,当M10再次闭合后,从初始状态开始重新输出D10指定的脉冲数;
PLSY指令没有加减速控制,当M0闭合后立即以D0指定的脉冲频率输出脉冲(所以该指令高速输出脉冲控制步进或是伺服并不理想);
在输出过程中改变D0的值,其输出脉冲频率立刻改变(调速很方便);
在输出过程中改变输出脉冲数D10的值,其输出脉冲数并不改变,只要驱动断开再一次闭合后才按新的脉冲数输出;
相关标志位与寄存器:
M8029:
脉冲发完后,M8029闭合。
当M10断开后,M8029自动断开。
M8147:
Y0输出脉冲时闭合,发完后脉冲自动断开;
M8148:
Y1输出脉冲时闭合,发完后脉冲自动断开;
D8140:
记录Y0输出的脉冲总数,32位寄存器
D8142:
记录Y1输出的脉冲总数,32位寄存器
D8136:
记录Y0和Y1输出的脉冲总数,32位寄存器
注意:
PLSY指令断开,再次驱动PLSY指令时,必须在M8147或M8148断开一个扫描周期以上,否则发生运算错误!
2、PLSR
匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置加减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
针对指定的最高频率,进行定加速,在达到所指定的输出脉冲数后,进行定减速。
3、PLSV指令,为任意时间可变速指令,可以实时改变脉冲频率的指令,在指令中可以设置脉冲的实时频率、发出脉冲的输出点,和方向点。
但是不能设置发出脉冲的总数,也就是不能通过指令定位,如果需要不是很精准的定位可以在使用高速点的时候用脉冲计数器和目标值做一个比较,但是会在PLC的每个扫描周期比较一次,所以会超出一些脉冲。
二、定位指令:
(包括DRVA和DRVI)他们都是为定位指令服务的,因此只能应用于高速点。
他们的指令表现形式基本一致,因此不做单一说明;
在他们指令中可以设置脉冲总数、脉冲频率、脉冲的发出点和方向点。
高速脉冲点的特点就是他们有自己的脉冲计数寄存器,也就是不管通过上述几个指令发出脉冲,高速点会有一个特定的寄存器记录所发出的脉冲数,包括正向的和反向的,可作为运动控制中每个轴的坐标。
以上两个指令不同之处就是:
DRVA是绝对记录脉冲式的,他的脉冲总数实际是他要到达的目标值,也就是和各高速点的计数寄存器相匹配,例如,当你输入脉冲目标值为20000,而你高速点的计数寄存器中是30000,这是他回朝着反向发出10000个脉冲;
而DRVI指令却不同,他不管高速点计数器中的脉冲坐标值,他会向正方向运行20000个脉冲,因而成为相对脉冲指令。
1
DRVI
相对控制指令
2
绝对控制指令
DRVA
关于两个指令的区别应该是比较清楚的了,这里,D8140显得特别重要。
关于D8140需要注意的是:
当使用DRVI或者DRVA指令时,因为是带方向的,驱动正转时,D8140数值是增加的,反转时,D8140里的数据是减小的。
而在使用PLSY或者PLSR时,因为没有方向指示,只要是发脉冲,D8140里的值都会增加,跟方向是没关系的。
编程时注意!
也因为这一点,在FX3U里新增了数据寄存器,D8340(Y0),D8350(Y1),D8360(Y2)来存储针对DRVI和DRVA指令时的脉冲累计,而用PLSY时,这几个寄存器的值都不会变。
绝对位置控制指令DRVA的输出脉冲数是根据D8140(D8142)的值来决定。
最好的方法就是先找到机械原点,然后把D8140(D8142)的值用MOV指令清零,让程序原点与机械原点一致,如此便于计算所发脉冲数。
注意:
1,在指令执行时,改变操作数的内容,无法在当前运行中表现出来。
只有在下一次指令执行时才有效。
2,当执行中,驱动信号变为OFF,将减速停止。
M8029不动作。
最后,看看官方给的相关软元件表


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PLSYPLSRPLSVDRVIDRVA 指令
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 国企会计岗位笔试试题及答案解析(分享).docx
国企会计岗位笔试试题及答案解析(分享).docx
-
代办营业执照合同协议书范本模板1.docx
-
工业机械手的PLC控制.doc
-
房屋砖混结构技术标.doc
-
消防工程监理评估报告.doc
-
[精品]杨树生产及存在问题与对策.docx
-
风险管理与金融机构课后附加题参考答案(中文版).doc
-
2021年全国安全知识竞赛经典题库及答案(共260题).docx
-
建筑工程合作协议书、建筑股东合作协议书.doc
-
高中班主任教育叙事3篇.docx
-
嵌入式软件系统期末大作业.docx
-
学校心理危机事件预警及处置预案.docx
-
一年级下册数学竞赛试题精选-.doc
-
二年级音乐学科期末试卷(人教版).doc
-
平顶山学院2021年招聘辅导员试题及答案.docx
-
小学数学应用意识与应用能力的培养课题总结报告.docx
-
企业宣传片初步报价方案.docx
-
市政道路工程设计合同.doc
-
竞赛筹备方案.docx
-
两位数加减两位数不进位不退位教学设计.docx
-
高中学生因病请假制度.docx
-
某某竹木垃圾粉碎加工厂竹木秸杆废弃物粉碎加工综合利用项目建议书.docx
 行政事业单位内部审计流程图(按照新内部审计准则).xls
行政事业单位内部审计流程图(按照新内部审计准则).xls
-
三年级下册道德与法治期末测试卷附答案(完整版).docx
-
疫情期间日常消毒记录表EXCEL模板(完整版).docx
-
商业银行个人信贷操作风险防控要点及案例解析.docx
-
优秀团员、团干评选方案.docx
-
基于PLC的 双门通道控制系统设计.docx
-
《弘扬真善美》教学设计.doc
-
五年级分数计算题.docx
-
西南大学0163答案.docx
-
医院义诊制度.docx
-
九江市双峰小学教学参考书目登记册Word文档下载推荐.docx
-
计算数学信息与机电工程学院上海师范大学Word文档下载推荐.docx
-
酒店管理网络方案设计毕业设计论文Word文档下载推荐.docx
-
聚创JC8000E型便携多功能水质采样器分体式说明书Word文档下载推荐.docx
-
技工荒分析Word文档下载推荐.docx
-
抗肿瘤药物行业分析报告Word下载.docx
-
简谱人教版小学一年级音乐下册教案1Word文件下载.docx
-
湖南省张家界市永定区三家馆中学学年八年级生汇总Word文档格式.docx
-
建设高素质的村党支部书记队伍Word文档下载推荐.docx
-
科教版小学五年级上册科学各单元复习题精选Word文件下载.docx
-
高校意识形态工作情况汇报1Word格式.docx
-
沪科版八年级数学上册第15章 轴对称图形与等腰三角形Word文档下载推荐.docx
-
精品病例分析Word文件下载.docx
-
高中化学口诀顺口溜Word下载.docx
-
跨境电商平台运营策划方案 跨境电商平台运营计划书doc文档格式.docx
-
精品贵州省普高等学校招生适应性考试文科数学试题 图片版Word文档下载推荐.docx
-
纪录片《筑Word文档下载推荐.docx
-
集成无源元件对PCB技术发展的影响Word文件下载.docx
-
个人房屋租赁合同Word格式文档下载.docx
