 救援机器人Word格式文档下载.docx
救援机器人Word格式文档下载.docx
- 文档编号:13506352
- 上传时间:2022-10-11
- 格式:DOCX
- 页数:14
- 大小:2.35MB
救援机器人Word格式文档下载.docx
《救援机器人Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《救援机器人Word格式文档下载.docx(14页珍藏版)》请在冰豆网上搜索。
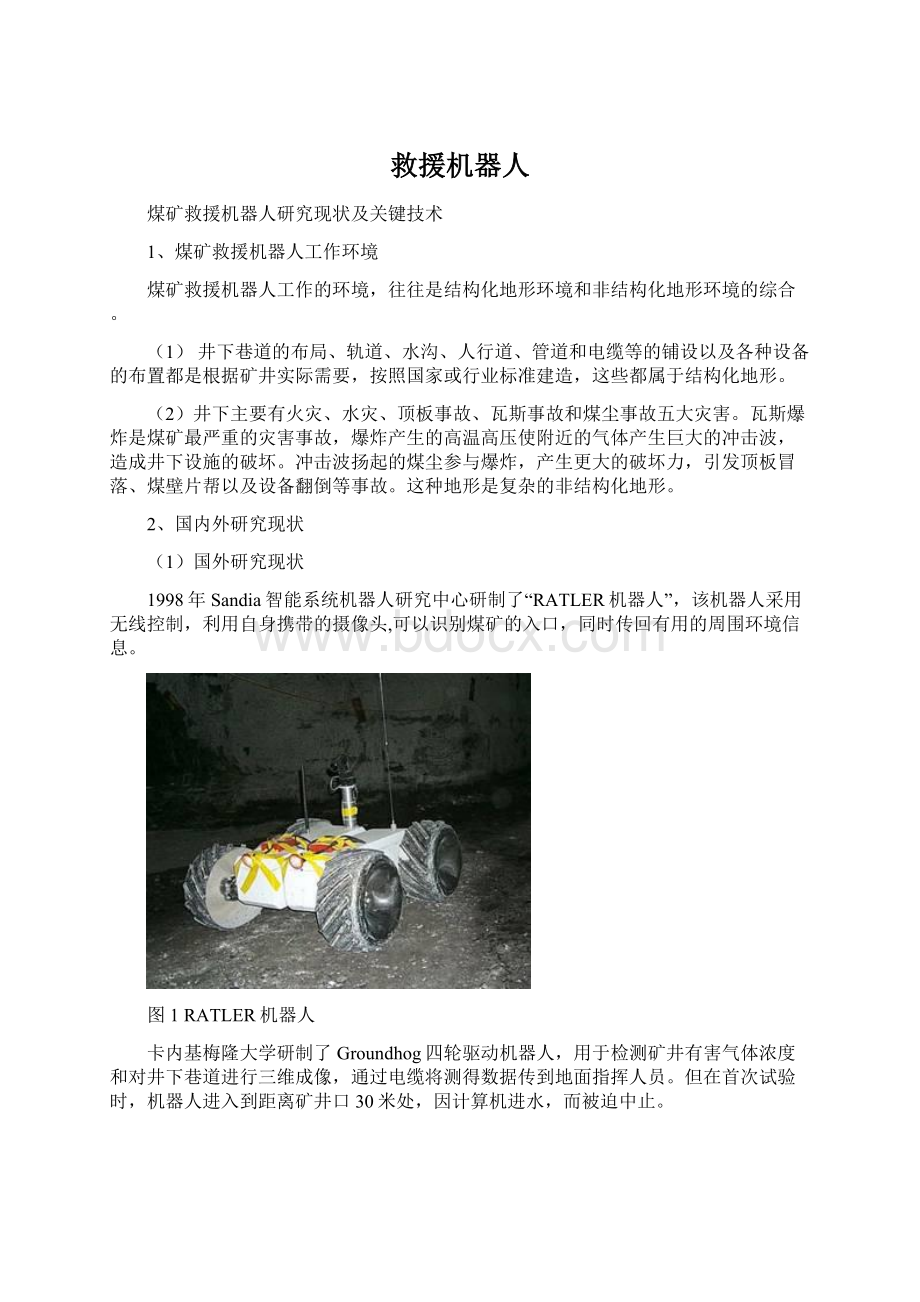
图1RATLER机器人
卡内基梅隆大学研制了Groundhog四轮驱动机器人,用于检测矿井有害气体浓度和对井下巷道进行三维成像,通过电缆将测得数据传到地面指挥人员。
但在首次试验时,机器人进入到距离矿井口30米处,因计算机进水,而被迫中止。
图2Groundhog侦查机器人
图3为2006年美国东部西弗吉尼亚州阿普舒尔县萨戈(Sago)煤矿发生矿难运用的机器人。
2007年8月美国Utah州发生煤矿事故,救援人员派出了UniversityofSouthFlorida研制的图4所示救援机器人,但因机器人中途行进过程中陷入泥潭而受阻。
图3美国救援机器人图4南佛罗里达救援机器人
GeminiScout是美国职业安全与健康中心资助圣帝亚国家实验室研制的一款矿井救灾机器人,如下图所示。
它为履带式双节机器人,长1.2m,宽0.7m,在身体上方有一个高出机体的摄像机桅杆,其上安装了一个能透过烟雾和尘埃的红外摄像头,配置了有毒气体传感器和爆炸气体传感器。
由一个灵活的关节连接身体的两节,使它能够通过复杂的地形和狭窄的角落。
采用遥控方式,由于无线控制容易受到井下环境的干扰,它同时以光纤通信装置为备用,以保障通信畅通。
它能够先于搜救人员进入危险的环境,为救援提前感知现场情况,当它寻找到伤员时,能够引导伤员到安全的环境,提供氧气、水、药品等必需品,它还能改装成能将伤员搬动或拖到安全地点的救援机器人。
图5GeminiScout矿井救灾机器人
BEAR救护机器人由美国维克那机器人公司研制,是一款类人救援机器人。
它采用双腿独立式履带,除自主移动外,还可利用膝盖、臀部或脚改变身体高度,以适应不同的地形条件,如图6所示。
图6BEAR机器人
东京工业大学的广濑是最早从事救援机器人研究学者之一,由他带头研制的蛇形机器人主要有SOURYU-I、SOURYU-II、SOURYU-III、ACM-R5。
SOURYU-III分别连接作为能够姿势变化的活动关节连接三个履带机构构成履带机器人。
ACM-R5蛇形机器人为水陆两用机器人利用模块化技术设计,整个本体结构分为多节,每节都在圆柱形物体上安装六枚类似鱼鳍的构件,然后利用履带将各节连接起来。
鱼鳍的顶端装有脚轮,但这种脚轮并不产生驱动力,而是通过蛇行方式或扭动身体实现陆地移动。
在水中的运动可以通过身体蛇行或螺旋运动来实现。
图6SOURYU-III蛇形机器人图7ACM-R5蛇形机器人
2006年6月,日本研制出新型搜救机器人—木槿,如图5所示,木槿全身都是特制的履带,四肢能够独立遥控,移动自如,具有较强的越障能力和环境适应能力,并装备了红外热敏摄像头,可以对受困人员或死难者进行定位,将拍摄的图像传送给救援人员。
图8日本搜救机器人木槿
日本横滨警察署研发设计的爬行者(Crawler)(如图3所示)的承载极限为250lb(1lb=0.4536kg),该机器人的主要作用是依靠“舱体”将被困人员安全运出危险区域。
大阪大学研制的足式救援机器人ASTERISK星标蜘蛛机器人,该机器人主要用于信息采集,如下图10所示。
图9Crawler救援机器人图10ASTERISK星标蜘蛛机器人
RSV矿井探测机器人是由Camborne大学设计制作,主要用于煤矿井下调查,全名为遥控调查机器人,装备激光扫描工具、无信通信模块,增加了井下探测范围。
图10为南加利福尼亚大学的CONRO多态搜救机器人。
图10RSV矿井探测机器人图11CONRO多态搜救机器人
(2)国内研究现状
中国矿业大学救灾机器人研究所研制了CUMT-I型矿井救灾机器人,是第一台用于煤矿救灾的机器人。
如图10所示,该机器人采用履带式行走机构,配置低照度摄像头,能够在烟雾和粉尘环境下获取井下视频信息,同时装备水、药品、工具等救灾物资,能帮助被困者展开自救。
KRZ-I矿用井下机器人装置,由哈尔滨工业大学机器人研究所为唐山开诚电器有限公司研制,如图11所示。
该机器人的行走机构为中部履带加前后摆臂三节式履带行走机构,由前摆履带、后摆履带、主驱动履带组成,摆臂摆腿收拢时长度约为1.1m,展开时约1.5m,配置CH4、CO、H2S等有毒气体传感器和湿度、温度传感器,质量接近200千克,工作时间2小时。
能爬越30斜坡、翻过单级台阶400mm、越沟宽度600mm、涉水深度300mm。
采用无线遥控和光纤通信两种遥控方式,井下机器人控制系统能对各个关节摆动、行走、转向等进行控制,井上控制盒上有两个控制摇杆和若干控制按钮以对井下机器人发出控制指令。
通过无线传输的方式实现井下实时视频信息、语言、传感器读数等参数的传送。
图12CUMT-I煤矿救灾机器人图13KRZ-I矿用井下机器人装置
2009年6月,河北省唐山市成功研制了矿用抢险探测机器人(如图12所示),该矿用抢险探测机器人具有防爆、越障、涉水、自定位、采集识别和传输各种数据的功能,能进入事故现场采集影像、数据信息,为及时抢险救人提供重要依据和参考。
图14唐山的煤矿探测机器人
沈阳自动化研究所研究了一种链式结构变形机器人,如图14。
该机器人采用新型链式结构避免干涉,通过连接臂和偏置关节实现了结构的组合和变形。
模块的信仰和偏转关节分别置于模块两侧,模块间通过连接臂来进行连接,通过模块与连接臂间相对位置的变化实现变形。
图15沈阳自动化研究的链式机器人
河南科技大学设计了一种新型的可穿戴式煤矿救援机器人,提出了基于脚部压力信息的传感系统设计方案,通过脚底4个压力传感器,采集人体在不同步态阶段脚底压力信息,为可穿戴式煤矿救援机器人控制系统提供相应数据。
冯新刚设计了一种基于ARM竖井救援机器人。
竖井救援机器人外形结构如图17所示,系统由PC井上控制器、井上和井下ZigBee无线通讯部分、ARM井下控制中心、井壁固定控制部分、水平定位控制部分、机械臂、手控制部分、抱臂控制部分、井下环境探测控制部分等组成。
ARM控制中心实现井下环境监控;
控制救援机器人到达预定位置后通过井壁固定装置纵横向伸展与井壁撑紧对自身的固定;
通过水平定位装置控制两支机械手水平定位到落井人员的肩部;
通过机械臂控制机械手沿垂直方向靠近落井人员的肩部;
通过控制3自由度机械手精确挟持住落井人员的双肩;
通过控制抱臂装置抱紧落井人员的腰部,固定其身体;
最后把落井人员救出。
图16可穿戴式煤矿救援机器人图17ARM竖井救援机器人
天津理工大学李浩等研究了一种轮履复合救援机器人。
该机器人采用了轮履复合变体轮,一种由驱动主轮、可变形履带、伸展机构及传动机构等组成的新型轮系。
在较好的路况下,变体轮以轮式状态行进以保证救援机器人具有较高的速度;
在复杂地形下,变体轮可由内部伸展机构展开成三角履带以达到高通过性的要求。
图18轮履复合变体轮原理图
如图19所示的狭小缝隙搜索机器人,同样采用履带式设计,但是不同于废墟表面机器人的是,它的体积更小,而且可以根据缝隙的大小,进行变形,以便更好的通过缝隙。
具体变形方式为4种,分别是三角型、并排型、直线型和D字型。
其中直线型可将3条履带并为一线,此时机器人宽度仅为20cm,可以钻入救援队员无法进入的细小缝隙,减少搜索救援的死角,同时可以通过搭载相关的图像或者其他传感模块,将废墟结构的内部信息传给外面操控的救援人员。
图19狭小缝隙搜索机器人
3、研究要点
根据煤矿井下环境,搜救机器人应满足以下要求:
(1)在非结构化的井下环境和台阶、楼梯等结构化环境中都有良好的通过能力、机动能力和运动稳定性;
(2)移动系统对传感、控制系统依赖性小,可以实现局部自主;
(3)具有较强的数据采集能力和实时通讯能力,及时采集数据并把它们传递到地面系统;
(4)在复杂环境中具有一定的自我防护能力,有良好的防爆、耐热、防水和防尘等性能;
(5)在平坦路面上运动时,具有较高的运动速度和较低的能耗;
(6)质量轻、体积小,各部分连接简单、可靠,便于制造和维修。
研究要点主要包括如下内容:
3.1机械结构
(1)机器人移动平台
现有的机器人移动平台包括:
1)轮式移动机器人
由于轮式移动机构翻越沟壑、连续台阶的性能不佳,这几年发展了一些动态连接车体与车轮的新型悬架,以改善轮式移动机构的特性,提高轮式移动机构的越障性能,如以下几种典型的轮式移动机构悬架。
A、6轮摇臂—转向架式悬架
图20六轮摇臂—转向架式悬架
B、6×
6独立铰链式悬架
图216*6独立铰链式悬架机构简图
C、复合变结构轮腿式悬架
复合变结构轮腿式移动机器人具有4组复合轮腿式驱动机构,整体对称。
腿式机构分大腿和小腿,机体与大腿用髋关节连接,大腿与小腿用膝关节连接,每个关节均有关节驱动电机。
同时在关节处还设有髋关节驱动轮、膝关节驱动轮和小腿未端的被动万向轮,驱动轮独立驱动。
在平坦地面时,抬高膝关节驱动轮,仅使用髋关节驱动轮行驶,以简化控制,提高驱动效率;
复杂地形条件下采用四腿迈步的方式实现行走;
而在较高台阶、沟壑、楼梯等非结构地形条件下则采用轮腿复合模式运动,通过腿的抬高或支撑和驱动轮的共同作用,实现越障。
图22复合变结构轮腿式悬架
D、轮腿结构合一式
图23RHex小型移动机器人
2)履带式移动机器人
履带式移动机器人可分为不同类型,根据履带的节数,可分为单节双履带移动机器人、双节四履带移动机器人、多节多履带式移动机器人;
根据履带结构是否可变,可分为固定履带结构移动机器人、可变形履带移动机器人;
根据移动机构组成的种类,可分为纯履带移动机器人、复合形履带式移动机器人。
A、单节双履带移动机器人
图18所示机器人采用单节双履带移动机构,为提高越障性能,采用三角形履带结构,使移动机器人前部履带面与地面成45左右倾角,提高机器人通过台阶等障碍地形的能力。
采用差动转向,即使两侧履带速度不同,在狭小空间中可实现原地转向。
由于采用单节履带结构,所以越障性能受到限制,较适合在楼宇、过道、机场等城市环境下使用。
图24单节双履带移动机器人
B、多节轮履复合式移动机器人
使用轮履复合式移动机构,中间为轮式移动机构,两端增加两节履带臂,在平整路面上可充分发挥轮式移动机构高速、低功耗的优点,在复杂地形条件下又充分利用履带臂提高机器人的通过性能,如图1-15所示。
这种移动机构通过履带臂的伸展运动,可以灵活调整体积和大小,伸展开时可以通过较大尺寸的障碍,收缩状态则可通过较小空间,实现的功能和多节履带式移动机构相类似。
图25多节轮履复合式移动机器人
C、底盘抬高型履带
底盘抬高型履带如图所示,它通过履带结构的设计,增大移动机器人底盘与地面之间的距离,防止路面凸起的石块与底盘发生干涉,提高移动机器人通过复杂地形的能力。
这种改进设计


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 救援 机器人
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 13检验科“三基”考试试卷_精品文档.doc
13检验科“三基”考试试卷_精品文档.doc
-
14以预防为先导_精品文档.doc
-
12高危药品分级管理制度及目录_精品文档.doc
-
13个病种中医护理方案_精品文档.docx
-
16检验科应对突发事件应急预案_精品文档.docx
-
12急救药品管理制度_精品文档.doc
 17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
-
14医疗器械召回程序_精品文档.wps
-
13医用耗材库房管理制度_精品文档.doc
-
136个幼儿园英语课堂游戏_精品文档.docx
-
182日本药用辅料管理介绍_精品文档.docx
-
18项核心医疗制度口袋书_精品文档.doc
-
20种方法调理女人气血不足_精品文档.doc
-
29儿科医疗质量评价体系与考核标准对_精品文档.doc
-
24人工智能辅助诊断技术临床应用质量控制指标_精品文档.docx
-
19家基层医疗卫生机构消毒供应室现状调查分析与探索_精品文档.docx
-
23种偏方调治贫血_精品文档.doc
-
30种常用中药的水试鉴别法_精品文档.docx
-
19种急救药品的作用和用途_精品文档.docx
-
26人工智能辅助治疗技术临床应用质量控制指标_精品文档.docx
-
221中医药人员队伍建设规划_精品文档.doc
-
41整形外科中级考试题目_精品文档.doc
-
258株铜绿假单胞菌的耐药性分析与研究_精品文档.doc
-
22ABXDX五分类血细胞分析仪操作保养规程_精品文档.doc
-
3HIV生产工艺规程_精品文档.doc
-
37-加强急救绿色通道的内涵建设_精品文档.doc
-
41---渠口农场医院创先争优创建学习型党组织活动总结_精品文档.doc
-
5输尿管结石临床路径_精品文档.doc
-
620防止意外伤害主题班会_精品文档.doc
-
6次临床医师三基培训考试试卷及答案_精品文档.docx
-
6份国家自然科学基金评审意见_精品文档.docx
-
64脑卒中的预防与健康管理1_精品文档.docx
 部编语文三年级上册重点句子归纳总复习超全面.pptx
部编语文三年级上册重点句子归纳总复习超全面.pptx
-
2017中考数学整理复习第三章函数PPT课件.pptx
-
广告设计全套PPT课件348p.pptx
-
18层小高层施工组织设计.docx
-
温病条辨全文.docx
-
国家基本药物临床应用指南讲稿.docx
-
万科-南京江宁万科金域蓝湾地产项目策略方案计划终稿.pptx
-
最新湘教版七年级地理下册全册教案(全册 共110页).docx
-
工程市政项目部管理制度.docx
-
2017保险基础知识考试题库.docx
-
2017年水利造价工程师继续教育考试题库及答案.docx
-
2018-2020年田园综合体村庄土地实战解决方案.pptx
-
人教版小学二年级数学上册口算题10000道40.docx
-
[2018秋季]最新人教版小学四年级语文上册全册精品课件2.pptx
-
大型化工集团公司安全管理制度汇编.docx
-
《教育理论基础》知识点整理(完整版).docx
-
2018年四川省广元市剑阁县事业单位招聘考试《综合知识》真题库及答案.docx
-
消费者行为分析与实务概述教案.doc
-
外研版八年级英语上册模块测试题全套及答案解析A.docx
