 JBC Botball小学组例程Word文档格式.docx
JBC Botball小学组例程Word文档格式.docx
- 文档编号:13408412
- 上传时间:2022-10-10
- 格式:DOCX
- 页数:23
- 大小:1.59MB
JBC Botball小学组例程Word文档格式.docx
《JBC Botball小学组例程Word文档格式.docx》由会员分享,可在线阅读,更多相关《JBC Botball小学组例程Word文档格式.docx(23页珍藏版)》请在冰豆网上搜索。
ao();
//关闭所有电机
}
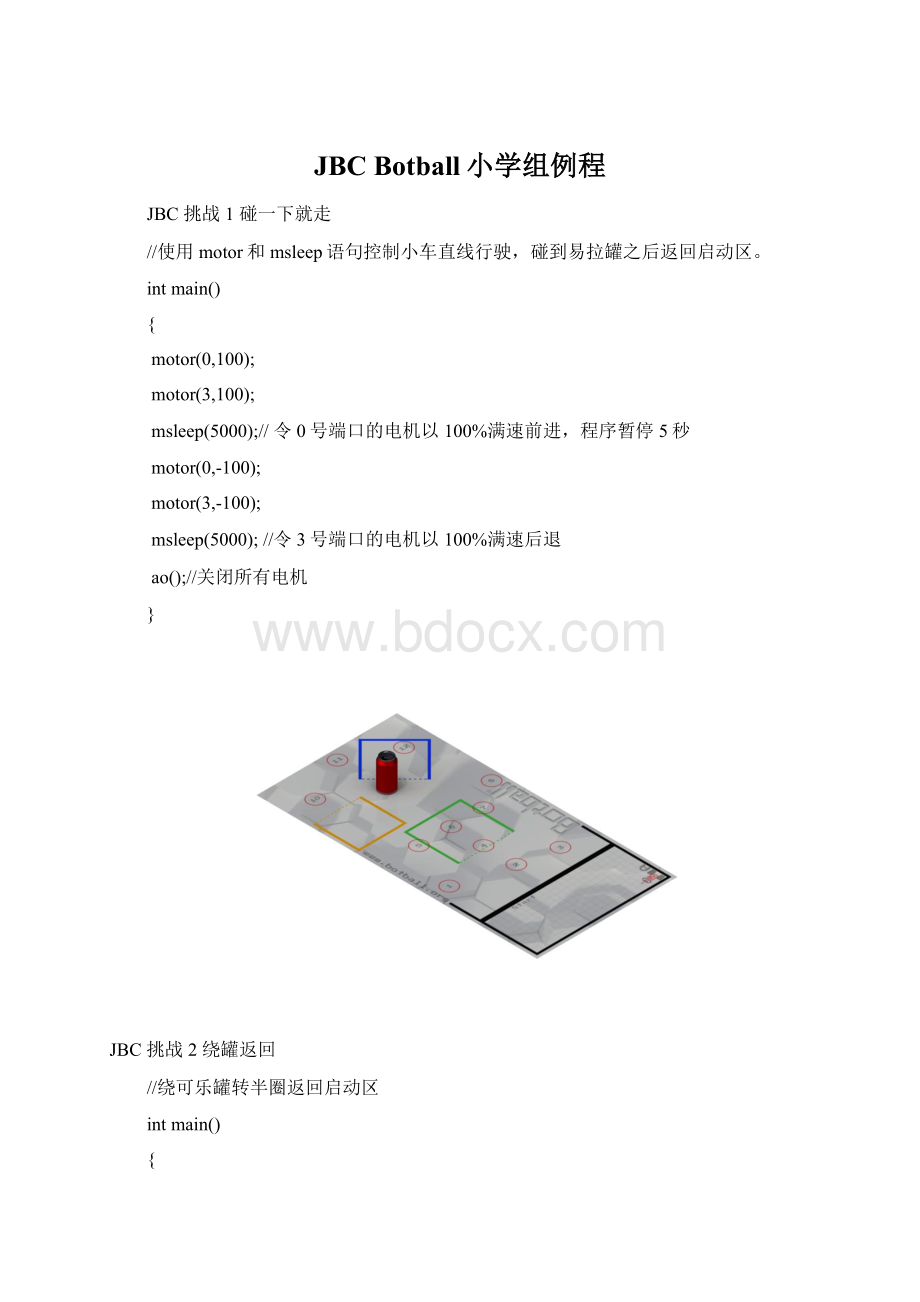
JBC挑战2绕罐返回
//绕可乐罐转半圈返回启动区
//0号和3号电机满速前进(直行)
motor(3,0);
msleep(1500);
//0号电机满速前进,3号电机停止运行(左转弯)
//直行
//左转弯
//返回启动区
JBC挑战3精确停靠
//使用motor语句以及msleep语句,让小车按照预定路线行驶,准确停在黄色、蓝色以及绿色库中。
绿色库:
msleep(4000);
//结束
蓝色库:
motor(0,50);
//0号电机以50%的速度前进,3号舵机以100%的速度前进1.5秒(右转弯)
msleep(3000);
黄色库:
msleep(1000);
}
JBC挑战4蛇形穿罐
//准确地使用语句让小车完成任务,使用函数让代码更加清晰易读
voiddrive_turn_left();
voiddrive_turn_right();
voiddrive_forward();
drive_turn_left();
drive_forward();
drive_turn_right();
drive_turn)right();
msleep(4500);
voiddrive_turn_left()
msleep(1200);
//左转弯
voiddrive_turn_right()
motor(0,0);
//右转弯
voiddrive_forward()
//直走
JBC挑战5全力装载
//在挑战3的基础之上加上机械臂来收集可乐瓶
进入绿色库:
进入蓝色库:
进入黄色库:
JBC挑战6疯狂推罐机
//机器人在比赛途中可以驶出场地纸,可以设计一个长机械臂,从场地后将罐子推到启动区
voiddrive_left();
voiddrive_right();
drive_right();
drive_left();
msleep(7000);
voiddrive_left()
voiddrive_right()
JBC挑战7沿线走
//使用传感器控制小车前进
intmain(){
while
(1){
if(analog10(0)>
=512)//在0号端口接入巡线传感器
{
mav(0,750);
mav(3,100);
msleep(200);
//如果非黑线,左转
}
elseif(analog10(0)<
512)
mav(0,100);
mav(3,750);
//如果黑线,右转
}
JBC挑战8清扫道路
//用触碰传感器和巡线传感器移动,控制舵机抓取一个易拉罐
enable_servo
(1);
//打开1号舵机
enable_servo(3);
//打开3号舵机
set_servo_position(1,1000);
//控制好机械爪的高度
set_servo_position(3,1500);
//打开机械爪
while(digital(15)!
=1)//巡线前进直到15号端口上的触碰传感器被按下
=512)//如果不是黑线左转
512)//如果黑线右转
ao();
//当端口15度数为“0”,电机停止运行
set_servo_position(3,440);
//机械爪抓取物品
//全速后退
disable_servos();
ao();
JBC挑战9直线行驶
//准确调整两个轮子的转速保持机器小车直线前进
//全速前进
(使用motor控制速度受电量影响,使用mav函数控制电机能够得到更稳定的结果)
JBC挑战10蛇形
//蛇形主要挑战灵活运用舵机的控制,通过控制舵机的转速来完成锐角弯和钝角弯。
msleep(500);
motor(3,95);
//使用motor、mav等函数到达指定位置
msleep(2000);
msleep(2500);
motor(3,50);
JBC挑战11沿着外缘走
//同挑战沿线走,适当调整巡线传感器的位置,适当


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- JBC Botball小学组例程 Botball 小学 例程
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《稻草人》精彩读书笔记精选多篇.docx
《稻草人》精彩读书笔记精选多篇.docx
-
《鸿门宴》原文及注解doc资料.docx
-
《张石匠拜师》教学设计.docx
-
1万亩滴灌鲜食葡萄建设项目可行性研究报告.docx
-
《长方体和正方体整理与复习课》说课稿.docx
-
7A文铁路隧道工程施工承包合同中英文.docx
-
《纪念刘和珍君》学案1.docx
-
《我们之间》读后感范文6篇.docx
-
BRW200315型乳化液泵组随机图册.docx
-
STM32实现万年历.docx
-
《保险学》考试复习资料要点.docx
-
《讲究卫生预防疾病》国旗下讲话.docx
-
《三国演义》读书笔记摘抄赏析好词好句读后感悟范文.docx
-
《路基路面工程》每章练习题.docx
-
《谛听教育的春天》读书笔记.docx
-
17春学期清考《市政学》在线作业1.docx
-
201X商品房现房买卖合同范本word范文 10页.docx
-
《欧姆定律》课件.docx
-
04上海虹口区高三历史二模课案.docx
-
7A版南大考研真题整理版.docx
-
《蝙蝠和雷达》教学设计.docx
-
2450m3高炉及225000kva矿热炉项目节能论证评估报告.docx
-
《商业银行管理学》课后习题答案.docx
-
《论语十二章》练习答案.docx
-
3年高考2年模拟1年原创系列小说阅读教案.docx
-
《小学数学生活化的研究》开题报告.docx
-
9A文汽车换挡机构设计指南.docx
-
《柴油机》课程教学设计.docx
-
《股票作手回忆录》读后感精选多篇.docx
-
《新闻纵横》生存类民生新闻的分析报告.docx
-
《科学探索者》丛书参考答案天文学.docx
-
《网络聊天那点事》5人年会晚会搞笑小品剧本台词.docx
-
河北省深州市长江中学学年高一下学期期末考试历史试题 Word版含答案文档格式.docx
-
How much are these pantsWord文件下载.docx
-
大连理工大学电子工程训练实验报告Word文档格式.docx
-
基于多因素分析的IT项目组合选择模型Word文件下载.docx
-
《仲裁法》司考真题汇集Word文档格式.docx
-
基于大数据的营销策略运用的研究与探索Word下载.docx
-
广东省惠州市届高三第二次调研考试语文Word下载.docx
-
基于实体理论的BOT项目内部关联交易合并报表研究(贺学春)Word格式.doc
-
三文鱼头豆腐汤 2Word格式文档下载.docx
-
基于客户满意度的第三方物流配送时效性和货物完好性研究以德邦物流为例Word格式文档下载.docx
-
3500个常用汉字表要点Word格式文档下载.docx
 超声在麻醉领域的应用PPT资料.pptx
超声在麻醉领域的应用PPT资料.pptx
-
高考真题和模拟题分项汇编英语专题09短文改错Word下载.docx
-
第二个月工作总结共20页Word格式文档下载.docx
-
全国区级联考上海市金山区届高三二模考试语文试题解析版Word下载.docx
-
财产清查盘点规章制度Word下载.docx
-
财务实习总结简短文档格式.docx
-
北大纵横中国兵器工业质量技安处处长岗位说明书Word下载.docx
-
四年级数学下册教学设计Word文件下载.docx
