 精品飞机着陆控制Word文档格式.docx
精品飞机着陆控制Word文档格式.docx
- 文档编号:13242130
- 上传时间:2022-10-08
- 格式:DOCX
- 页数:10
- 大小:39.60KB
精品飞机着陆控制Word文档格式.docx
《精品飞机着陆控制Word文档格式.docx》由会员分享,可在线阅读,更多相关《精品飞机着陆控制Word文档格式.docx(10页珍藏版)》请在冰豆网上搜索。
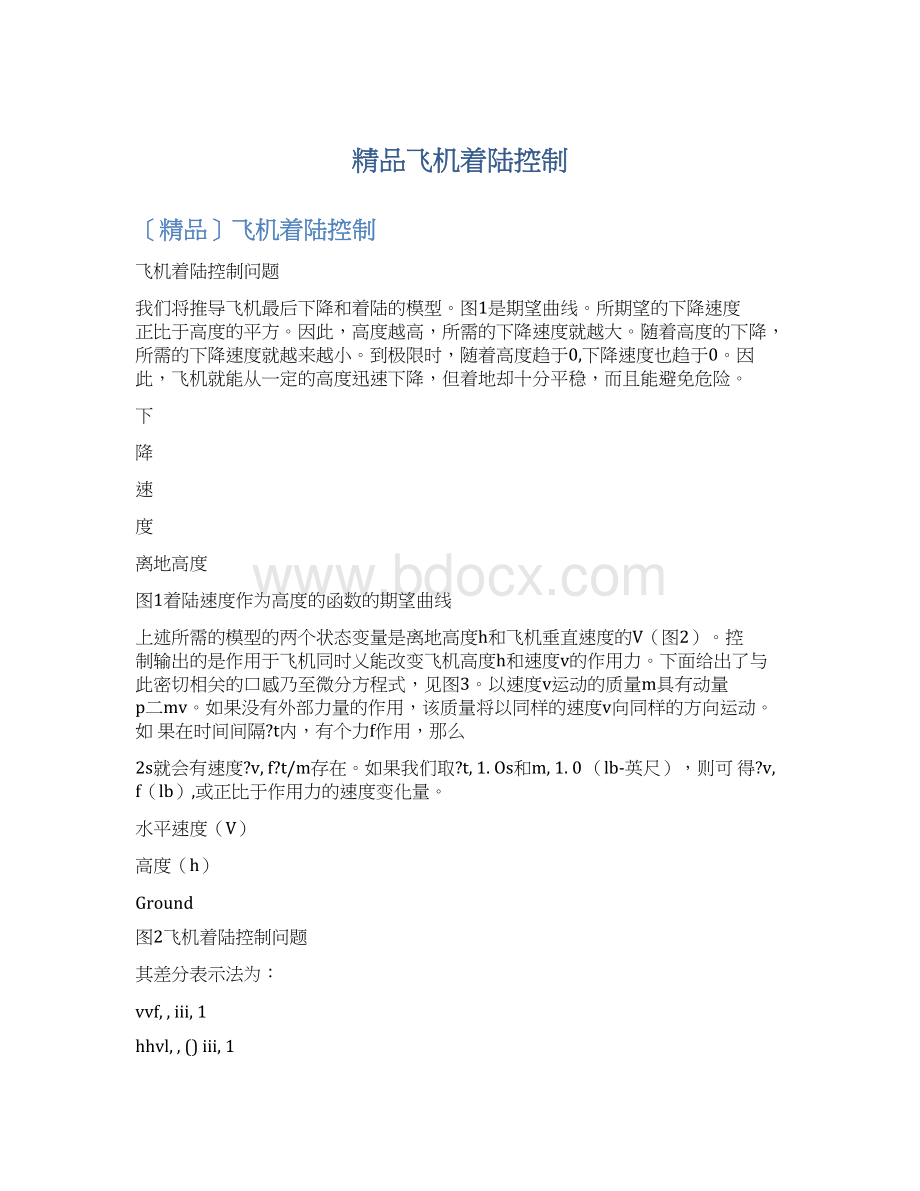
t/m存在。
如果我们取?
t,1.Os和m,1.0(lb-英尺),则可得?
v,f(lb),或正比于作用力的速度变化量。
水平速度(V)
高度(h)
Ground
图2飞机着陆控制问题
其差分表示法为:
vvf,,iii,1
hhvl,,()iii,1
这里是新速度,是原速度。
是新高度,是原高度。
vvhhi,lii,li
下面,我们推导高度h,速度v和控制力f的隶属度函数。
第1步:
定义状态变量的隶属函数,如下:
表1高度的隶属函数
高度(英尺)
01002003004005006007008009001000高(L)0000000.20.4
0.60.81中(M)00000.20.40.60.810.80.6低(S)0.40.60.81
0.80.60.40.2000接近零(NZ)10.80.60.40.2000000.
表2速度的隶属函数
垂直速度(英尺/s)
30,25,20,15,10,5051015202530(UL)0000000000.5
111(US)00000000.510.5000(Z)000000.510.500000(DS)0000.510.50000000(DL)1110.5000000000
接近零小中大
1.0
0.8
0.6
0.4
0.2
01002003004005006007008009001000
高度
图3高度h的分段
大降小降零小升大升
0.2
30,25,20,15,10,5051015202530
水平速度
图4速度v的分段
笫2步:
定义控制输出的隶属函数,如下:
输出力(lbs)
30,25,20,15,10,5051015202530(UL)0000000000.5
30,25,20,15,10,5051015202530
控制力(1/s)
控制力f的分段
笫3步:
定义规则并归纳成FAM表,表中的之代表控制输出。
如下:
速度
高度DLDSZeroUSUL
(L)ZDSDLDLDL
(M)USZDSDLDL
(S)ULUSZDSDL
(NZ)ULULZDSDS
FAM表
第4步:
笫一初始条件,推导模型。
因为本任务是控制飞机接近和着陆时的垂直下降速度,我们设飞机的高度1000英尺,下降速度为,20英尺/s。
我们用下面的表达式更新每步状态变量。
hhv,,iii,1
初始速度:
v0:
20
初始高度:
h0:
1000
控制力:
要计算
高度h取L对应1.0,M对应0.6
速度v仅DL对应1.0
高度速度输出
L(l.O)ANDDL(l.O),Z(l.O)
M(O.6)ANDDL(l.O),US(O.6)
我们用质心法进行非模糊化,并得到fO,5.81bso这是从初始条件汁算得到的
输出力。
-ioa1020
28
ZUS1.01.0
20v0-10010h10
-1001020f
fO二5.8
现在,计算状态变量的新值和下一步循环的输出:
hl二h0+v0二1000+(-20)二980
vl二v0+f0二-20+5.8二-14.2
高度hl二980英尺时,L取0.96和M取0.64
速度vl二-14.2英尺/s时,DS取0.58和DL取0.42
L(0.96)ANDDS(O.58),DS(O.58)
L(0.96)ANDDL(O.42),Z(0.42)
M(0.64)ANDDS(0.58),Z(0.58)
M(0.96)ANDDL(0.42),US(0.42)我们重新计算状态变量的新值和下一步循
环的输出:
h2二hl+vl二980+(-14・2)=965.8
v2二vl+fl二-14.2+(-0.5)=-14.7
高度h2二965.8英尺时,L取0.93和M取0.67
速度v2=-14.7英尺/s时,DL取0.43和DS取0.57
高度速度输岀
L(0.93)ANDDL(0.43),
Z(0.43)
L(0.93)ANDDS(0.57),
DS(0.57)
M(0.67)ANDDL(0.43),
US(0.43)
M(0.67)ANDDS(0.57),
US(0.57)我们找出此循环的质心f2=,0.41bso
我们就可以依次循环,计算出飞机的轨迹。
主要程序如下:
〃模糊规则定义,模糊推理
//高度的规则,隶属度函数
dx二double(PlaneH);
辻(dx>
500&
&
dx<
=1000)
HL二dx/500-1;
elseHL二0;
if(dx>
800)
HM二(800-dx)/500+l;
elseif(dx>
300&
=800)
HM二(dx-300)/500;
else
HM二0;
0&
300)
HS二(dx+200)/500;
HS=(800-dx)/500;
elseHS=0;
500)
HNZ二l-dx/500;
elseHNZ二0;
//速度的规则,隶属度函数
speedUL二0;
speedUS二0;
speedZ二0;
speedDS二0;
speedDL二0;
if(speedx>
20)
speedUL二1;
辻(speedx<
=20&
speedx>
10)
speedUL二speedx/10T;
辻(speedx>
=10&
speedx<
20)speedUS二2-speedx/10;
=0&
10)speedUS二speedx/10;
10)speedZ二1-speedx/10;
if(speedx<
~10)speedZ=l+speedx/10;
辻(speedx〉TO&
speedx〈O)speedDS二-speedx/10;
二-20&
speedx〈T0)speedDS二speedx/10+2;
if(speedx〈-20)
speedDL二1;
speedx〈T0)speedDL二一speedx/lOT;
////////////////////////////////////////////////////////////////////
//定义FAM表
//doubleHL,HM,HS,HNZ;
//定义高度
//doublespeedUL,speedUS,speedZ,speedDS,speedDL;
//定义速度//doublefUL,fUS,fZ,fDS,fDL;
//定义控制力
//模糊推理
//FAM表的第一行
fUL二0;
fUS二0;
fZ二0;
fDS二0;
fDL二0;
if(HL!
=O)
{if(speedDL!
二0)
{if(HL>
=speedDL)fZ11二HL;
elsefZll二speedDL;
}
if(speedDS!
=speedDS)fDS12二HL;
elsefDS12二speedDS;
if(speedZ!
=speedZ)fDL13=HL;
elsefDL13二speedZ;
if(speedUS!
=0)
{if(HLNspeedUS)fDL14=HL;
elsefDL14二speedUS;
if(speedUL!
=speedUL)fDL15=HL;
elsefDL13二speedUL;
//////////////////////////////////////////////////////////////
N①ST畐爲zsoj(zp缶dsuoVH)j-rd)(oJ.zpaedsLI
(「sopeMSUZZZJ8^二VHUZZZJ(sop务dsuoVH)j二(oJ.sop^ds)*
宀Lapids匕zsru①s%二VH匕ZSfUQap^dsu合H)3二(ol'
.」ap%ds)s
(ol'
.KHW
宀二(」np缶dsuoVH)3二
(0l'
」np%ds)J-rH宀-snpeedsHVZ」吕as%二VH2Z」吕(snpeedsuoVH)JI)(Ouisflp^ds/I
NpeedsueezJ①SI®
-SHUeezJ(zp缶dsu〈SH)3二
(oJ.zp^ds)JI
宀-SOP务dsuzcosfuQsv-SHUZcosfu(sop缶ds乂SH)3二
(Ol'
.sap^ds/I
宀Lop缶ds匕co」njas%-SH匕COTUQop^dsu合H)3二
(OHuap^as)s(OJ.SH)JI
(OJ.ZNH)M
宀宀
①SI®
-SHUgsQJ(」np缶dsu〈SH)3二
」np%ds)J-rH宀-snp^dsuves吕as%-SHUVesaJ(snp缶dsu〈SH)JI)(oJ.sflptDCDdsW
NP缶dsuevzj①SI®
-ZNHUVZJ(zp缶dsu〈ZNH)3二(oJ.zp%as)M宀-sop缶dsuzvTU①SI®
-ZNHUZVTU(sop%dsu〈ZNH)3二(oJ.sop%as)JI宀nop^dsus


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 精品 飞机 着陆 控制
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 国企会计岗位笔试试题及答案解析(分享).docx
国企会计岗位笔试试题及答案解析(分享).docx
-
代办营业执照合同协议书范本模板1.docx
-
工业机械手的PLC控制.doc
-
房屋砖混结构技术标.doc
-
消防工程监理评估报告.doc
-
[精品]杨树生产及存在问题与对策.docx
-
风险管理与金融机构课后附加题参考答案(中文版).doc
-
2021年全国安全知识竞赛经典题库及答案(共260题).docx
-
建筑工程合作协议书、建筑股东合作协议书.doc
-
高中班主任教育叙事3篇.docx
-
嵌入式软件系统期末大作业.docx
-
学校心理危机事件预警及处置预案.docx
-
一年级下册数学竞赛试题精选-.doc
-
二年级音乐学科期末试卷(人教版).doc
-
平顶山学院2021年招聘辅导员试题及答案.docx
-
小学数学应用意识与应用能力的培养课题总结报告.docx
-
企业宣传片初步报价方案.docx
-
市政道路工程设计合同.doc
-
竞赛筹备方案.docx
-
两位数加减两位数不进位不退位教学设计.docx
-
高中学生因病请假制度.docx
-
某某竹木垃圾粉碎加工厂竹木秸杆废弃物粉碎加工综合利用项目建议书.docx
 行政事业单位内部审计流程图(按照新内部审计准则).xls
行政事业单位内部审计流程图(按照新内部审计准则).xls
-
三年级下册道德与法治期末测试卷附答案(完整版).docx
-
疫情期间日常消毒记录表EXCEL模板(完整版).docx
-
商业银行个人信贷操作风险防控要点及案例解析.docx
-
优秀团员、团干评选方案.docx
-
基于PLC的 双门通道控制系统设计.docx
-
《弘扬真善美》教学设计.doc
-
五年级分数计算题.docx
-
西南大学0163答案.docx
-
医院义诊制度.docx
-
21 质量环境和职业健康安全问题处理制度.docx
-
《常用卫生法律法规》试题及答案.docx
-
PMC自我评价范文.docx
-
3000字寒假社会实践报告doc.docx
-
《故宫博物院》教案.docx
-
DIY小型数控电脑雕刻机制作全过程1.docx
-
Java外文翻译programminglanguage.docx
-
RFID课程实践实训报告.docx
-
10以内数的分解与组合练习题.docx
-
《河岳英灵集叙》神来气来情来说考论.docx
-
201X年度医院送医下乡义诊活动总结word范文 13页.docx
-
《影视美学》彭吉象吐血整理笔记完全版.docx
-
《煤矿安全规程》教案.docx
-
Excel中各种VBA写法.docx
-
《彩虹鸽》优秀读后感精选10篇.docx
-
XX年汛期学校安全工作总结.docx
-
《走遍俄罗斯》第一册教学计划.docx
-
PSP《刀剑神域无限时刻》二周目通关攻略.docx
-
110kV变电工程施工组织设计.docx
