 《机械优化设计》习题与答案Word文档格式.doc
《机械优化设计》习题与答案Word文档格式.doc
- 文档编号:13016408
- 上传时间:2022-10-02
- 格式:DOC
- 页数:10
- 大小:266.50KB
《机械优化设计》习题与答案Word文档格式.doc
《《机械优化设计》习题与答案Word文档格式.doc》由会员分享,可在线阅读,更多相关《《机械优化设计》习题与答案Word文档格式.doc(10页珍藏版)》请在冰豆网上搜索。
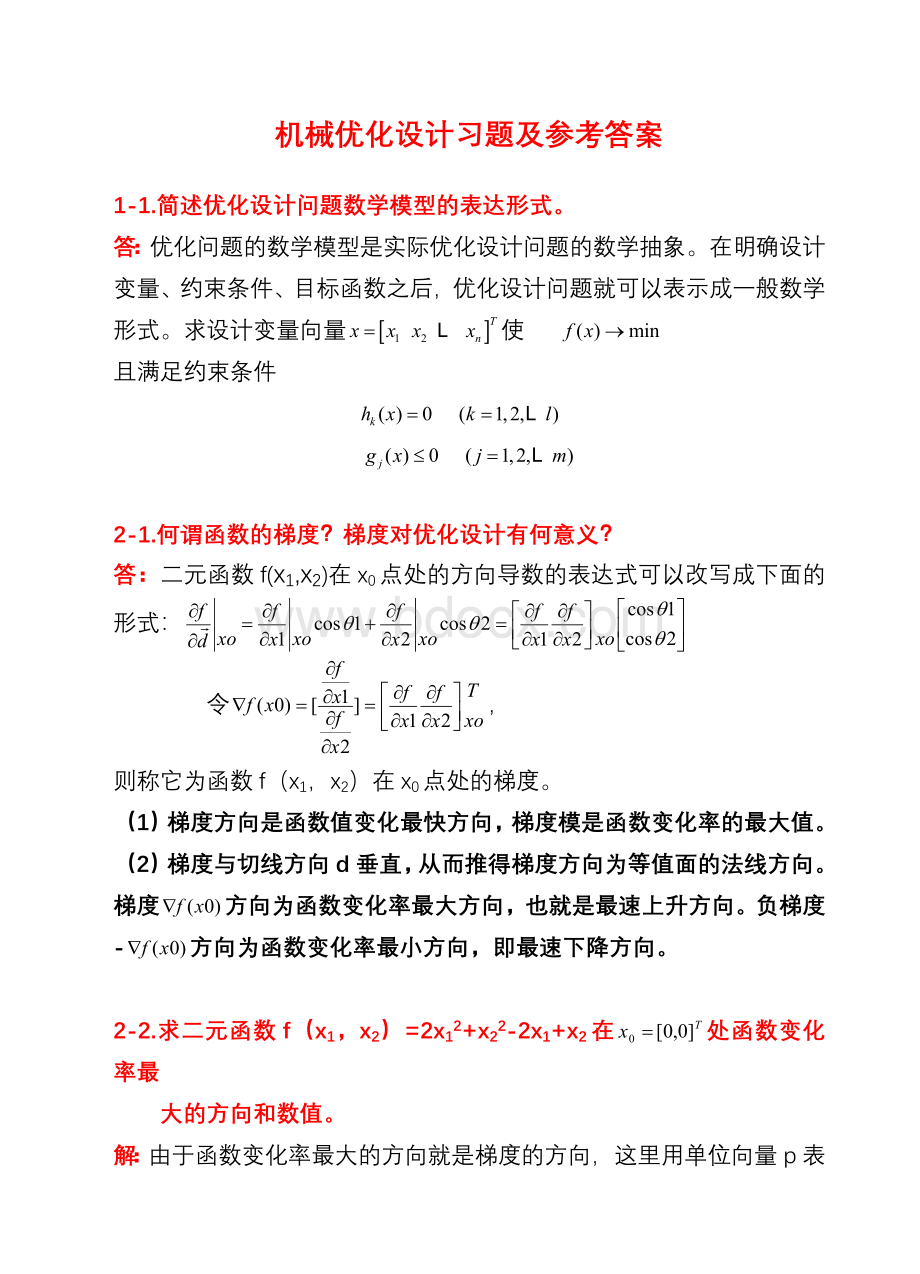
由于函数变化率最大的方向就是梯度的方向,这里用单位向量p表示,函数变化率最大和数值时梯度的模。
求f(x1,x2)在x0点处的梯度方向和数值,计算如下:
=
2-3.试求目标函数在点X0=[1,0]T处的最速下降方向,并求沿着该方向移动一个单位长度后新点的目标函数值。
求目标函数的偏导数
则函数在X0=[1,0]T处的最速下降方向是
这个方向上的单位向量是:
新点是
新点的目标函数值
2-4.何谓凸集、凸函数、凸规划?
(要求配图)
一个点集(或区域),如果连接其中任意两点x1、x2的线段都全部包含在该集合,就称该点集为凸集,否则为非凸集。
函数f(x)为凸集定义域的函数,若对任何的及凸集域的任意两点x1、x2,存在如下不等式:
称f(x)是定义在图集上的一个凸函数。
对于约束优化问题
若都是凸函数,则称此问题为凸规划。
3-1.简述一维搜索区间消去法原理。
(要配图)
搜索区间(a,b)确定之后,采用区间逐步缩短搜索区间,从而找到极小点的数值近似解。
假设搜索区间(a,b)任取两点a1,b1,a1《b1,并计算函数值f(a1),f(b1)。
将有下列三种可能情形;
1)f(a1)《f(b1)由于函数为单谷,所以极小点必在区间(a,b1)
2)f(a1)》f(b1),同理,极小点应在区间(a1,b)
3)f(a1)=f(b1),这是极小点应在(a1,b1)
3-2.简述黄金分割法搜索过程及程序框图。
其中,为待定常数。
3-3.对函数,当给定搜索区间时,写出用黄金
分割法求极小点的前三次搜索过程。
(要列表)
黄金分割法的搜索过程
序号
a
a1
a2
b
Y1
比较
Y2
-5
-1.18
1.18
5
-0.9676
<
3.7524
1
-2.639
-1.181
?
1.686
>
-0.967
2
-0.279
-0.48
3
-1.737
-0.457
-0.482
3-4.使用二次插值法求f(x)=sin(x)在区间[2,6]的极小点,写出计算步骤和迭代公式,给定初始点x1=2,x2=4,x3=6,ε=10-4。
4
x1
4.55457
x2
4.73656
4.72125
x3
6
y1
0.909297
-0.756802
-0.987572
y2
-0.999708
-0.999961
y3
-0.279415
xp
4.71236
yp
-1
迭代次数K=4,极小点为4.71236,最小值为-1
,,
收敛的条件:
4-1.简述无约束优化方法中梯度法、共轭梯度法、鲍威尔法的主要区别。
梯度法是以负梯度方向作为搜索方向,使函数值下降最快,相邻两个迭代点上的函数相互垂直即是相邻两个搜索方向相互垂直。
这就是说在梯度法中,迭代点向函数极小点靠近的过程,走的是曲折的路线。
这一次的搜索方向与前一次的搜索过程互相垂直,形成“之”字形的锯齿现象。
从直观上可以看到,在远离极小点的位置,每次迭代可使函数值有较多的下降。
可是在接近极小点的位置,由于锯齿现象使每次迭代行进的距离缩短,因而收敛速度减慢。
这种情况似乎与“最速下降”的名称矛盾,其实不然,这是因为梯度是函数的局部性质。
从局部上看,在一点附近函数的下降是最快的,但从整体上看则走了许多弯路,因此函数的下降并不算快。
共轭梯度法是共轭方向法中的一种,因为在该方法中每一个共轭的量都是依赖于迭代点处的负梯度而构造出来的,所以称作共轭梯度法。
该方法的第一个搜索方向取作负梯度方向,这就是最速下降法。
其余各步的搜索方向是将负梯度偏转一个角度,也就是对负梯度进行修正。
所以共轭梯度法实质上是对最速下降法进行的一种改进,故它又被称作旋转梯度法。
鲍威尔法是直接利用函数值来构造共轭方向的一种共轭方向法,这种方法是在研究其有正定矩阵G的二次函数的极小化问题时形成的。
其基本思想是在不用导数的前提下,在迭代中逐次构造G的共轭方向。
在该算法中,每一轮迭代都用连结始点和终点所产生出的搜索方向去替换原向量组中的第一个向量,而不管它的“好坏”,这是产生向量组线性相关的原因所在。
因此在改进的算法中首先判断原向量组是否需要替换。
如果需要替换,还要进一步判断原向量组中哪个向量最坏,然后再用新产生的向量替换这个最坏的向量,以保证逐次生成共轭方向。
4-2.如何确定无约束优化问题最速下降法的搜索方向?
优化设计是追求目标函数值最小,因此搜所方向d取该点的负梯度方向-。
使函数值在该点附近的围下降最快。
按此规律不断走步,形成以下迭代的算法
(k=0,1,2,…)
由于最速下降法是以负梯度方向作为搜索方向,所以最速下降法有称为梯度法
为了使目标函数值沿搜索方向-能获得最大的下降值,其步长因子应取一维搜索的最佳步长。
即有
根据一元函数极值的必要条件和多元复合函数求导公式得;
或写成
由此可知,在最速下降法中,相邻两个迭代点上的函数梯度相互垂直。
而搜索方向就是负梯度方向,因此相邻的两个搜索方向相互垂直。
这就是说在最速下降法中,迭代点向函数极小点靠近的过程。
4-3.给定初始值x0=[-7,11]T,使用牛顿法求函数的极小值点和极小值。
梯度函数、海赛矩阵分别为
(2分)
(4分)
假设初始值x0=[-7,11]T
则(1分)
(2分)
则(1分)
x1满足极值的必要条件,海赛矩阵是正定的,所以是极小点
。
(2分)
4-4.以二元函数为例说明单形替换法的基本原理。
如图所示在平面上取不在同一直线上的三个点x1,x2,x3,以它们为顶点组成一单纯形。
计算各顶点函数值,设f(x1)>
f(x2)>
f(x3),这说明x3点最好,x1点最差。
为了寻找极小点,一般来说。
应向最差点的反对称方向进行搜索,即通过x1并穿过x2x3的中点x4的方向上进行搜索。
在此方向上取点x5
使x5=x4+(x4-x1)
x5称作x1点相对于x4点的反射点,计算反射点的函数值f(X5),可能出现以下几种情形;
1)f(x5)<
f(x3)即反射点比最好点好要好,说明搜索方向正确,可以往前迈一步,
也就是扩。
2)f(x3)<
f(x5)<
f(x2)即反射点比最好点差,比次差点好,说明反射可行,一反射点代替最差点构成新单纯形
3)f(x2)<
f(x1),即反射点比次差点差,比最差点好,说明x5走的太远,应缩回一些,即收缩。
4)f(x5)>
f(x1),反射点比最差点还差,说明收缩应该多一些。
将新点收缩在x1x4之间
5)f(x)>
f(x1),说明x1x4方向上所有点都比最差点还要差,不能沿此方向进行搜索。
5-1.简述约束优化方法的分类。
(简述约束优化问题的直接解法、间接解法的原理、特点及主要方法。
)
答:
直接解法通常适用于仅含不等式约束的问题,它的基本思路是在m个不等式约束条件所确定的可行域选择一个初始点,然后决定可行搜索方向d,且以适当的步长沿d方向进行搜索,得到一个使目标函数值下降的可行的新点,即完成一个迭代。
再以新点为起点,重复上述搜索过程,满足收敛条件后,迭代终止。
所谓可行搜索方向是指,当设计点沿该方向作微量移动时,目标函数值将下降,且不会越出可行域。
产生可行搜索方向的方法将由直接解法中的各种算法决定。
直接解法的原理简单,方法实用。
其特点是:
1)由于整个求解过程在可行域进行,因此迭代计算不论何时终点,都可以获得一个比初始点好的设计点。
2)若目标函数为凸函数,可行域为凸集,则可保证获得全域最优解。
否则,因存在多个局部最优解,当选择的初始点不相同时,可能搜索到不同的局部最优解。
为此,常在可行域选择几个差别较大的初始点分别进行计算,以便从求得多个局部最优解中选择最好的最优解。
3)要求可行域为有界的非空集,即在有界可行域存在满足全部约束条件的点,且目标函数有定义。
直接解法有:
随机方向法、复合形法、可行方向法、广义简约梯度法等。
间接解法有不同的求解策略,其中一种解法的基本思路是将约束优化问题中的约束函数进行特殊的加权处理后,和目标函数结合起来,构成一个新的目标函数,即将原约束优化问题转化成一个或一系列的无约束优化问题。
再对新的目标函数进行无约束优化计算,从而间接地搜索到原约束问题的最优解。
间接解法是目前在机械优化设计中得到广泛应用的一种有效方法。
1)由于无约束优化方法的研究日趋成熟,已经研究出不少有效的无约束最优化方法和程序,使得间接解法有了可靠的基础。
目前,这类算法的计算效率和数值稳定性也都有了较大提高。
2)可以有效地处理具有等式约束的约束优化问题。
3)间接算法存在的主要问题是,选取加权因子比较困难,加权因子选取不当,不但影响收敛速度和计算精度,甚至会导致计算失败。
间接解法有惩罚函数法和增广乘子法。
5-2.用点法求下列问题的最优解:
(提示:
可构造惩罚函数,然后用解析法求解。
[解]构造点惩罚函数:
令惩罚函数对x的极值等于零:
得:
舍去负根后,得
当。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械优化设计 机械 优化 设计 习题 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 党组织、党员联系服务师生工作制度.docx
党组织、党员联系服务师生工作制度.docx
 物流与供应链管理 第七章 供应链综合计划.pptx
物流与供应链管理 第七章 供应链综合计划.pptx
-
民族团结教案doc格式.docx
-
民族团结教案doc格式.docx
-
中国象棋ppt模板.pptx
-
设备质量保证措施.docx
-
电力公司招聘行政能力测试试题及解析.docx
 回弹仪检测多孔砖砖强度计算表.xls
回弹仪检测多孔砖砖强度计算表.xls
-
汽车理论1.3.doc
-
电动汽车充换电站项目商业计划书.doc
-
幼儿园指南试题及答案.doc
-
护理教案模板.doc
-
资料台账表格.xlsx
-
红军长征的历史叙述是怎样形成的.docx
-
冷库工程合同.docx
-
部编版五年级上册语文课堂作业本答案(全).docx
-
《网络综合布线》说课稿.doc
-
材料进场,见证取样及检验制度.docx
-
20章--瓦斯综合利用.doc
-
[原创]STP保温板屋面及外墙保温施工技术方案.doc
-
隧道开挖作业台车计算书.docx
-
《减法的初步认识》教学设计.doc
-
教导处工作计划.docx
-
电机学第五版课后答案汤蕴璆完整版.docx
-
同仁堂案例成功启示.docx
-
经典钣金结构设计规范.doc
-
计算机各种进制转换练习题(附答案).doc
-
市场营销教学案例分析.docx
-
服装厂质量管理制度.docx
-
中职试验教材应用文写作(高教版_王崇国编)电子教案【全】.doc
-
控烟考评奖惩制度、标准、记录表.doc
-
小学生“学宪法-讲宪法”活动知识竞赛题库(含答案).docx
-
奥法县交规模拟考试精选第5套试题.docx
-
八年级物理声练习题2.docx
-
八年级语文上册第四单元分课优化测控试题附答案.docx
-
拔高教育学年高二历史下学期期末考试试题2.docx
-
版初级会计职称《初级会计实务》真题D卷 附答案.docx
-
包包流行款式名称大全教学提纲.docx
-
保险代理人资格考试仿真真题卷及答案2.docx
-
春中级劳动经济学满分作业.docx
-
参考文档龙陵松山抗战遗址心得体会优秀word范文 13页.docx
-
催人泪下七字祭文 怀念母亲.docx
-
操作系统习题集讲解.docx
-
大多数家长做错了育儿时80的精力处理情绪20的矫正行为.docx
-
茶艺师考试重点.docx
-
大型商场租赁协议2.docx
-
常见工程施工合同纠纷及对策分析.docx
-
大学计算机基础实验封面2.docx
-
常用家谱模版.docx
-
大学生就业中自我定位存在的问题及对策.docx
-
超微针刀.docx
