 雷达原理的复习资料Word文档下载推荐.docx
雷达原理的复习资料Word文档下载推荐.docx
- 文档编号:13005117
- 上传时间:2022-10-02
- 格式:DOCX
- 页数:14
- 大小:174.36KB
雷达原理的复习资料Word文档下载推荐.docx
《雷达原理的复习资料Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《雷达原理的复习资料Word文档下载推荐.docx(14页珍藏版)》请在冰豆网上搜索。
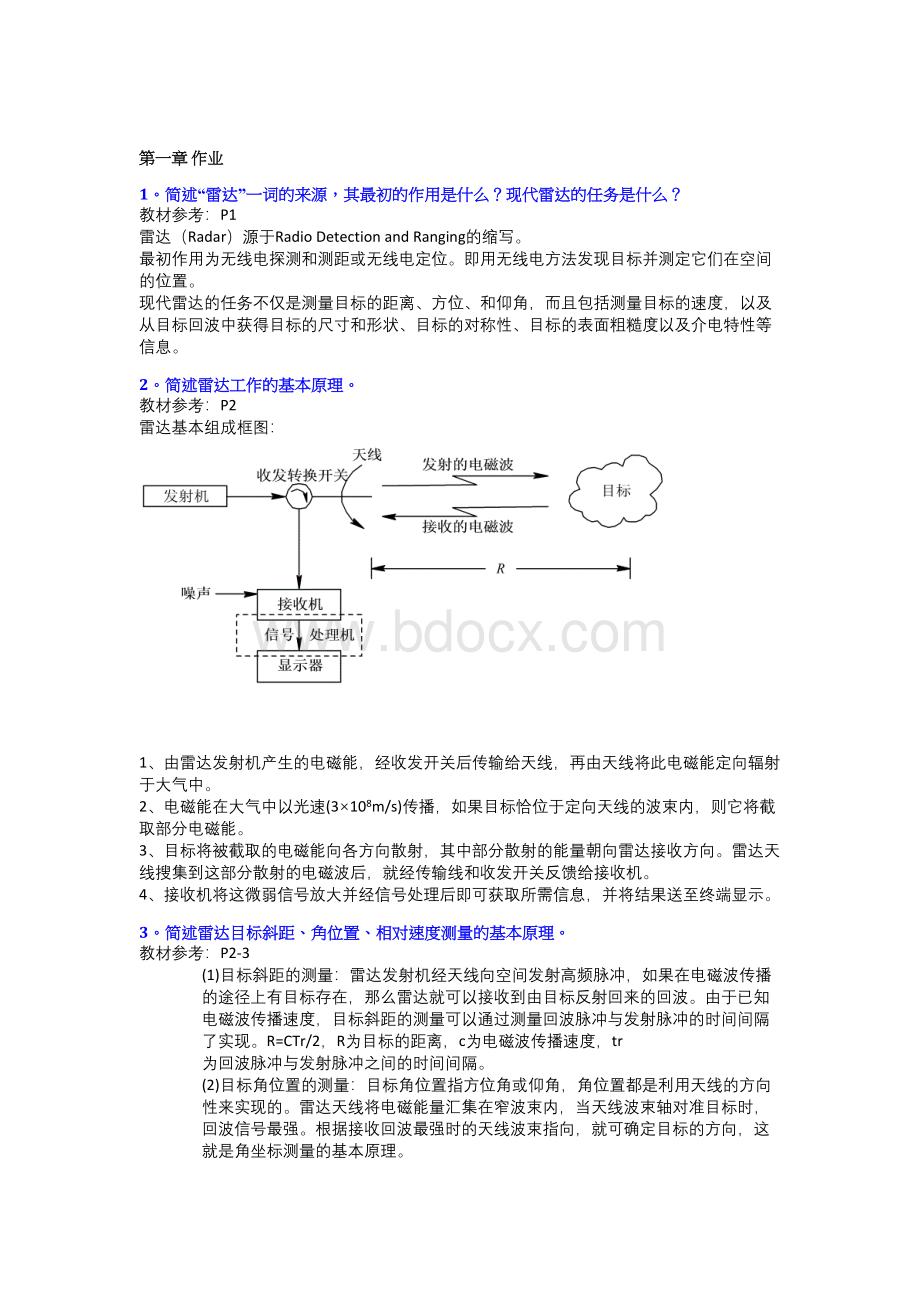
108m/s)传播,如果目标恰位于定向天线的波束内,则它将截取部分电磁能。
3、目标将被截取的电磁能向各方向散射,其中部分散射的能量朝向雷达接收方向。
雷达天线搜集到这部分散射的电磁波后,就经传输线和收发开关反馈给接收机。
4、接收机将这微弱信号放大并经信号处理后即可获取所需信息,并将结果送至终端显示。
3。
简述雷达目标斜距、角位置、相对速度测量的基本原理。
P2-3
(1)目标斜距的测量:
雷达发射机经天线向空间发射高频脉冲,如果在电磁波传播的途径上有目标存在,那么雷达就可以接收到由目标反射回来的回波。
由于已知电磁波传播速度,目标斜距的测量可以通过测量回波脉冲与发射脉冲的时间间隔了实现。
R=CTr/2,R为目标的距离,c为电磁波传播速度,tr为回波脉冲与发射脉冲之间的时间间隔。
(2)目标角位置的测量:
目标角位置指方位角或仰角,角位置都是利用天线的方向性来实现的。
雷达天线将电磁能量汇集在窄波束内,当天线波束轴对准目标时,回波信号最强。
根据接收回波最强时的天线波束指向,就可确定目标的方向,这就是角坐标测量的基本原理。
(3)相对速度的测量:
当目标与雷达站之间存在相对速度时,接收到回波信号的载频相对于发射信号的载频产生一个频移(称为多卜勒频移),当目标向着雷达站运动时Vr>0,反之Vr<0。
雷达只要能够测量出回波信号的多卜勒频移fd,就可以确定目标与雷达站之间的相对速度。
,fd为多卜勒频移,Vr为雷达与目标之间的径向速度,λ为载波波长。
4.某雷达发射机峰值功率为800KW,矩形脉冲宽度为3微妙,脉冲重复频率为1000Hz,求该发射机的平均功率和工作比。
解:
重复周期:
,平均功率:
工作比:
5、雷达中心频率f0=3000MHz,回波信号相对发射信号的延迟时间为1000微妙,回波信号频率为3000.01MHz,目标运动方向与目标所在的方向的夹角为60度,求目标距离、径向速度和线速度。
目标距离:
波长,多卜勒频率径向速度,线速度第二章作业
一部脉冲雷达,(a)要获得60nmi(海里)的最大非模糊距离,雷达的脉冲重复频率应是多少?
(1海里=1852米)
(b)当目标处于最大非模糊距离上,则雷达信号往返的时间是多长?
(c)如果雷达的脉冲宽度为1.5us,则在距离坐标上脉冲能量在空间的范围(用m表示)是多少?
(d)两个相等尺寸的目标如果要被1.5us的脉冲宽度完全分辨出来,则二者必须相距多远(m)?
(e)如果雷达的峰值功率为800kW,则平均功率是多少?
(f)这部雷达的占空因子是多少?
P27
由题目最大非模糊距离为60nmi=60*1852=111120m,脉冲的重复频率为fr=c/2Rmax=1.349khz。
脉冲的重复时间Tr=2*Rmax/c=2*111120/3*108=740.8us。
如果脉宽为1.5us,则在距离坐标上脉冲能量在空间的范围是D=c*τ=3*108*1.5us=450m。
如果相等尺寸的两个目标要被1.5us的脉冲宽度完全分辨出来,则二者必须相距225m
如果峰值功率为800kW,则
Pav=Pt*τ/Tr=Pt*τ*fr=8*105*1.5*10-6*1.349*103=1.62kW。
D=τ*fr=1.5*10-6*1.349*103=2.025*10-3
第三章作业
(a)—部由噪声系数为1.4、增益为15的低噪声射频放大器,变频损耗为6。
0dB,噪声温度比为1。
2的混频器和噪声系数为1。
0的中频放大器组成的超外差接收机,求其总的噪声系数。
(b)如果射频低噪声放大器的增益为30而不是15,那么(a)中的接收机噪声系数为多大?
(c)如果(a)中的中频放大器噪声系数为30而不是1。
0,那么接收机总的噪声系数应为多大?
F1=1.4,G1=15,
tc=F2*G2,10logG2=-6=>
G2=10^(-0.6)=1/4=0.25,=>
F2=tc/G2=4.8
试推导教材p58式(3。
28)。
P58
两个单元电路级联时,F1、F2和G1、G2分别表示第一、二级电路的噪声系数和额定功率增益。
为了计算总噪声系数F0,先求实际输出的额定噪声功率No=kT0BnG1G2F0,No由两部分组成:
一部分是由第一级的噪声在第二级输出端呈现的额定噪声功率No12,其数值为kT0BnF1G1G2,第二部分是由第二级所产生的噪声功率ΔN2=(F2-1)kT0BnG2,从而有No=kT0BnG1G2F0=kT0BnG1G2F1+(F2-1)kT0BnG2。
同理得总噪声系数即,雷达接收机的高、中频部分增益为
,代入得到接收机总噪声系数为。
什么是噪声系数、等效噪声温度、相对噪声温度,它们的物理意义分别是什么?
P55-P58
噪声系数是接收机输入端信号噪声比与输出端信号噪声比的比值。
它的物理意义是表示由于接收机内部噪声的影响,使接收机输出端的信噪比相对其输入端的信噪比变差的倍数。
为了更直观地比较内部噪声与外部噪声的大小,可以把接收机内部噪声在输出端呈现的额定噪声功率ΔN等效到输入端来计算,这时内部噪声可以看成是天线电阻RA在温度Te时产生的热噪声。
温度Te称为等效噪声温度。
它的物理意义是把接收机内部噪声看成是“理想接收机”的天线电阻RA在温度Te时所产生的,此时实际接收机变成“理想接收机”。
相对噪声温度有时简称为噪声比tc,其意义为实际输出的中频额定噪声功率(FckT0BnGc)与仅由等效损耗电阻产生的输出额定噪声功率(kT0Bn)之比,噪声比tc表示有源四端网络中除损耗电阻以外的其它噪声源的影响程度。
4.下图中馈线、接收机放电器、限幅器增益均为0.9,低噪声高放增益为20dB,噪声系数为3,混频器增益为0.2,相对噪声温度为2,中放增益为120dB,噪声系数为4,求总噪声系数。
如果去掉低噪声高放,则总噪声系数为多少?
无源总损耗,混频器噪声系数总噪声系数去掉低噪声高放5。
减小最小可检测信号功率可以采用哪些措施?
P59
为了提高接收机的灵敏度,即减少最小可检测信号功率Simin,应做到:
①尽量降低接收机的总噪声系数F0,所以通常采用高增益、低噪声高放;
②接收机中频放大器采用匹配滤波器,以便得到白噪声背景下输出最大信号噪声比;
③式中的识别系数M与所要求的检测质量、天线波瓣宽度、扫描速度、雷达脉冲重复频率及检测方法等因素均有关系。
在保证整机性能的前提下,尽量减小M的数值。
6。
什么叫接收机的增量增益?
要使接收机不丢失目标对增量增益有何要求?
什么是接收机的动态范围?
P70
接收机的增量增益是接收机放大器振幅特性曲线上某点的斜率,描述叠加在干扰上的回波信号的放大量。
只要接收机中某一级的增量增益Kd≤0,接收机就会发生过载,即丢失目标回波信号。
动态范围D来表示接收机抗过载性能的好坏,它是当接收机不发生过载时允许接收机输入信号强度的变化范围。
7.简述并图示平衡式收发开关的原理,图示开关同相相加和反相相消的过程。
平衡式收发开关的原理图如图所示。
图中TR1、TR2是一对宽带的接收机保护放电管。
在这一对气体放电管的两侧,各接有一个3dB裂缝波导桥,整个开关的四个波导口的连接如图所示。
3dB裂缝桥的特性为:
在四个端口中,相邻两端(例如端口1和2)是相互隔离的,当信号从其一端输入时,从另外两端输出的信号大小相等而相位相差90°
。
平衡式收发开关原理图
(a)发射状态;
(b)接收状态
8、简述分支线收发开关的原理,说明四分之一波长开路线和短路线的作用;
画出原理图说明。
发射时:
气体放电管TR(称为“接收机保护放电器”)和ATR(称为“发射机隔离放电器”)被电离击穿,对高频短路。
它们到主馈线的距离约为1/4波长,因此在主馈线aa′和bb′处呈现的输入阻抗为无穷大,发射的高功率信号能顺利送至天线。
因为此时TR短路,发射能量不能进入接收机。
分支线型收发开关原理图
接收时:
TR和ATR都不电离放电。
此时ATR支路的1/4波长开路线在主馈线aa′呈现短路,aa′与接收支路bb′处相距1/4波长,从bb′端向发射机看去的阻抗相当于开路,所以从天线来的回波信号全部进入接收机。
由于分支线型收发开关带宽较窄,承受功率能力较差,通常已被平衡式收发开关所代替。
9.根据雷达接收机高、中频部分的框图和所给的参数,推导接收机的总噪声系数;
若不采用高放,直接用混频器作为接收机的第一级,再推导其总噪声系数。
为什么接收机要采用高增益低噪声高放?
n级电路级联时接收机的总噪声系数,将图中所标的各级的额定功率增益和噪声系数代入上式,其中前面三级只贡献增益不贡献噪声,得到接收机总噪声系数为。
若不采用高放,直接用混频器作为接收机的第一级,得,合并得其中=。
第四章作业
1.简述并图示动圈式平面位置显示器中光电变换法产生方位刻度的原理。
有机械和电子的两类。
固定电子方位刻度是在荧光屏上产生一系列等方位角的径向亮线。
每条亮线对应一特定的方位。
为了产生这些方位刻度,应在天线每转一特定角度Δθ时,就产生一个方波,并加在示波管栅极或阴极上。
方波宽度应等于一个或几个距离扫掠重复周期。
显然,在0°
、Δθ、2Δθ、……及nΔθ(n=1,2,3,…)方位上出现方位刻度。
用光电变换法产生方位刻度的原理如图4.20所示。
刻度盘上每隔Δθ开有一个小孔,与天线同步转动,在它的两边有光源和光电变换器。
光电变换器由光电二极管VD1,光电放大器V1和钳位二极管VD2组成。
光电二极管VD1被反向偏置,并作为晶体管V1的基极电阻。
第五章作业
教材雷达方程两种基本关系式(5。
8)、(5。
9)给出的与波长关系是相反的。
试解释其原因。
P129
式(5。
9)是雷达距离方程的两种基本形式,它表明了作用距离Rmax和雷达参数以及目标特性间的关系。
8)Rmax与λ1/2成反比,而在式(5。
9)Rmax与λ1/2成正比。
这是由于当天线面积不变、波长增加时天线增益下降,导致作用距离减小;
而天线增益不变,波长增加时要求的天线面积亦相应增大,有效面积增加,其结果是作用距离加大。
什么叫虚警和漏警?
虚警概率、漏警概率、发现概率、正确不发现概率四者满足什么数学关系?
P133
门限电压检测时如果有信号而误判为没有信号称为漏警,只有噪声时误判为有信号称为虚警。
存在目标时,判为有目标,这是一种正确判断,称为发现,它的概率称为发现概率Pd;
存在目标时,判为无目标,这是错误判断,称为漏报,它的概率称为漏报概率Pla;
不存在目标时判为无目标,称为正确不发现,它的概率称为正确不发现概率Pan;
不存在目标时判为有目标,称为虚警,这也是一种错误判断,它的概率称为虚警概率Pfa。
四种概率存在以下关系:
Pd+Pla=1,Pan+Pfa=1。
3.某雷达要求虚警时间为2小时,接收机带宽为1MHz,求虚警概率和虚警数。
若要求虚警时间大于10小时,问门限电平应取多少?
虚警时间满足虚警数由于,所以4。
球体截面积按波长分为几个区?
在这几个分区的雷达目标分


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 雷达 原理 复习资料
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 第二章-传统相机的性能与种类.ppt
第二章-传统相机的性能与种类.ppt
 三级健康管理师题库(附答案).docx
三级健康管理师题库(附答案).docx
-
房屋租赁合同范本(有法律效益).docx
-
合作协议书中(英文)版.docx
-
人音版小学三年级上册音乐教案.docx
-
餐饮店合股投资协议书.docx
-
城市综合管廊特点及设计要点解析.docx
-
机械助理工程师个人工作总结.docx
-
建设单位会议管理办法.docx
-
国有企业在“一带一路”中的发展路径.docx
-
幼儿园与家长签订的安全责任书.docx
-
2018年助理值班员职业技能竞赛专业知识考试试题及答案.docx
-
初中物理学科的核心素养.docx
-
军训结束教官讲话稿范本.docx
-
人教版新起点五年级英语上册全册教案.docx
-
唱歌跑调怎样办,唱歌超难听怎样办.docx
-
某拟提拔干部近三年工作总结.docx
-
最美教师事迹材料.docx
-
广播电视概论第一章绪论.pptx
-
质量管理体系考试试题及答案2.docx
-
《串联和并联》练习题.pptx
-
高端装备制造项目可行性研究报告.docx
-
新教师入职培训心得体会(9篇).docx
-
最新部编版三年级上册语文第8课《卖火柴的小女孩》教案第3单元教学设计.docx
-
2019年初级保育员理论知识考试真题及答案.docx
 专业分包合同风险控制要点一览表 - 副本.rtf
专业分包合同风险控制要点一览表 - 副本.rtf
-
2019年最新主题教育围绕“四个对照”“四个找一找”在专题民主(组织)生活会个人对照检视检查研讨材料.docx
-
2018年度公司培训计划方案.docx
-
企业债券发行法律服务意向书---律所整理.docx
-
2019年事业单位法律知识考题及答案解析.docx
-
2019-2020学年人教版(新起点)英语五年级上册全册教案.docx
-
轨道焊接方案.docx
-
工业废水气浮处理工艺设计.docx
-
城中村改造可行性研究报告.docx
-
初级商务英语BEC考试模拟试题含答案.docx
-
分离乙醇水精馏塔设计含经典实用工艺流程图和塔设备图.docx
-
豆奶制作工艺流程.docx
-
大班建构计划.docx
-
电子商务专业术语.docx
-
高级审计师考试押题.docx
-
公安局创卫工作简报.docx
-
安全生产责任制考核制度和考核表.docx
-
Java程序设计教程答案.docx
-
初级会计实务模拟考试试题.docx
-
培养孩子自信的小故事.docx
-
弱电CAD符号大全是CAD文件.docx
-
在日本沙漠绿化访华团欢迎仪式上的讲话.docx
-
设备维修工作计划新编.docx
-
初三期中评语范文.docx
-
风电道路施工方案.docx
-
商业计划书报告.docx
