 三菱第四轴参数.docx
三菱第四轴参数.docx
- 文档编号:12929871
- 上传时间:2023-04-22
- 格式:DOCX
- 页数:39
- 大小:21.91KB
三菱第四轴参数.docx
《三菱第四轴参数.docx》由会员分享,可在线阅读,更多相关《三菱第四轴参数.docx(39页珍藏版)》请在冰豆网上搜索。
三菱第四轴参数
机种
CV系列
主题
三菱
第四轴相关之资料
编
号
日期:
2008/01/13
纪录:
kevin
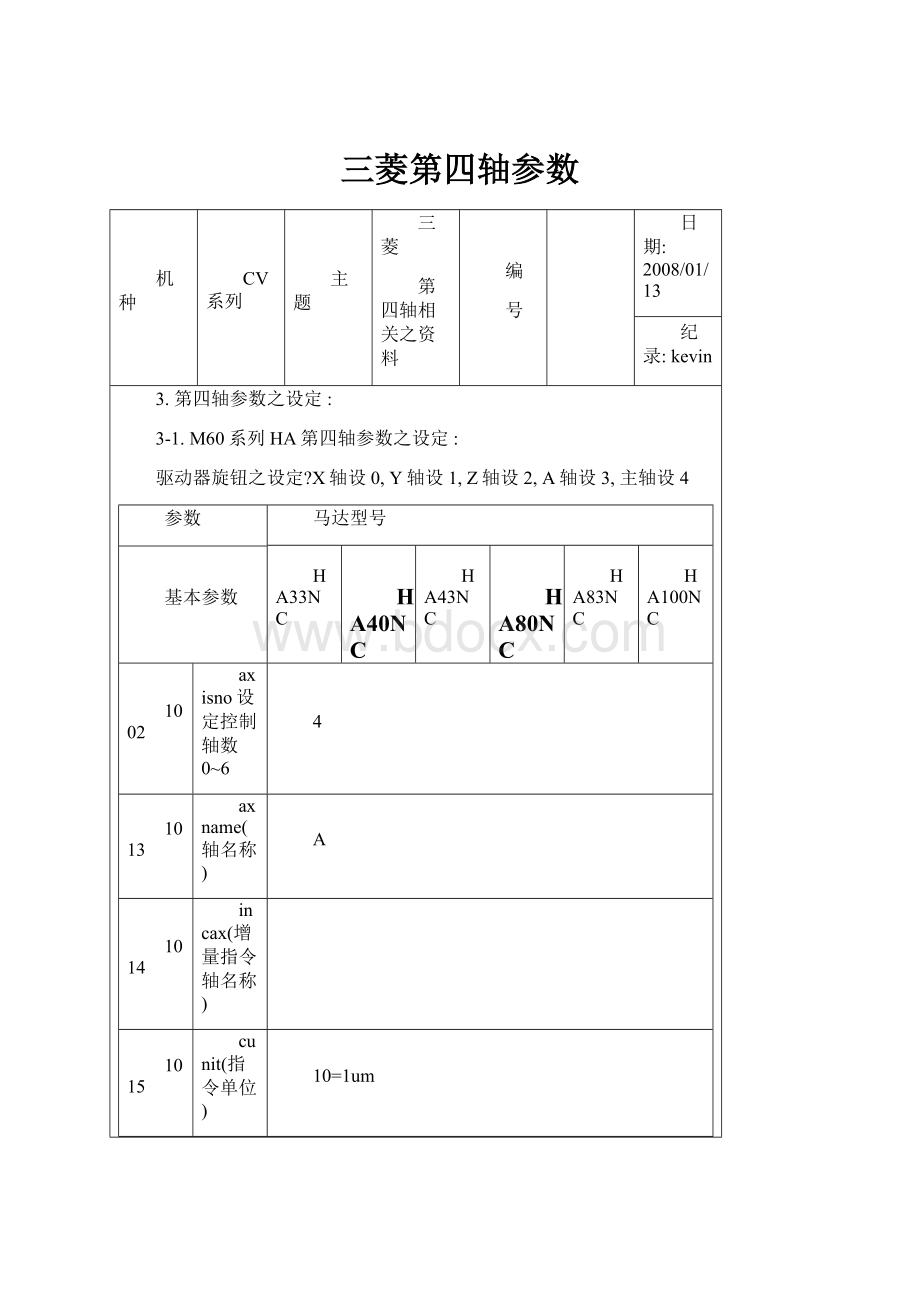
3.第四轴参数之设定:
3-1.M60系列HA第四轴参数之设定:
驱动器旋钮之设定?
X轴设0,Y轴设1,Z轴设2,A轴设3,主轴设4
参数
马达型号
HA33NC
HA40NC
HA43NC
HA80NC
HA83NC
HA100NC
基本参数
1002
axisno设定控制轴数0~6
4
1013
axname(轴名称)
A
1014
incax(增量指令轴名称)
1015
cunit(指令单位)
10=1um
1016
iout(英制输出)
0
1017
rot(旋转轴)
1(旋转轴)
1018
ccw(马达旋转方向)
0(顺时针)
1019
dia(直径指定轴)
0
1061
intabs(手动ABS更新)
1
1064
svof(误差修正)
0
1070
axoff(轴取出)
1轴取出有效
1089
Cut_RT(旋转轴捷径)(就近回零点位置)
1
轴规格参数
2001
rapid(快速进给)
4000
2002
clamp(切削进给速度钳住机能)
2000
2003
smgst(加速减速模式)
0021
2004
GotL(G0时间常数)
150
2005
Got1(G0时间常数一次延迟)
150
2006
Got2
未使用
2007
G1tL(G1时间常数)
30
2008
G1t1(G1时间常数一次延迟)
30
2009
G1t2
未使用
2010
fwd_g(前馈进给增益)
40
2011
G0back(G0背隙补正)
不定值
2012
G1back(G1背隙补正)
不定值
2013
OT-(软体极限?
-)
1.000
2014
OT+(软体极限?
+)
1.000
2015
Tlml-(TOOLPRESETTER的负方向感测器位置)
0.000
2017
tap_g(攻牙时位置回路增益)
15
2024
Synerr(误差容许值)
0.000
2068
G0fwdg(G00前馈进给增益)
0.000
复归点参数
2025
G28rap(G28快速进给速度)
4000
2026
G28crp(G28接近速度)
200
2027
G28sft(参考点偏移量)
不定值(归原点位置)
2028
grmask(栅点掩蔽量)
0
2029
grspc(栅格量间距)
1:
90设4/1:
120设3/1:
180设2
2030
dir(-)(参考点复归方向)
0
2031
noref(无参考点的轴)
0
2032
nochk(参考点复归是否完成并不检查)
0
机种
CV系列
主题
三菱
第四轴相关之资料
编
号
M08013
日期:
2008/01/13
纪录:
kevin
参数
马达型号
HA33NC
HA40NC
HA43NC
HA80NC
HA83NC
HA100NC
伺服参数
2201
PC1
1
2202
PC2
90/120/180
2203
PGN1(位置回路增益)
26/33
2204
PGN2
70/86
2205
VGN1(速度回路增益)
150
2206
VGN2
0
2207
VIL
0
2208
VIA(速度回路前进补偿)
1900
2209
IQA(电流回路的内部补偿)
2048
2210
IDA(电流回路的内部补偿)
2048
2211
IQG(电流回路的内部补偿)
384
2212
IDG(电流回路的内部补偿)
512
2213
ILMT1(静态定格电流对应的比例)
500
2214
ILMTsp(静态定格电流对应的比例)
500
2215
FFC
100
2216
LMC1
0
2217
SPEC
0000(绝对值设定0080,光学尺设定0100)
2218
PIT(导螺杆螺距)
360
2219
RNG1
100
2220
RNG2
100
2221
OLT
60
2222
OLL
150
2223
ODI
6
2224
INP(定位宽度值)
50
2225
MTYP(马达/检测器型式)
228F
2200
2280
2201
2281
2202
2226
OD2
6
2227
SSF1
4000
2229
VCS
0
2231
OVS1
0
2232
TOF
0
2233
SSF2
0000
2234
SSF3
0000
2235
SSF4
0000
2236
PTYP
1000[设定1000(没接RB036),设定1500(有接RB036)]
2247
EC1(诱起电压补正)
100
2249
PGN1SP
15
2253
DFBN
100
2257
SHGC
160/187
8201
轴取出(轴要取出设1)
0
8204
OT-check(过行程检查的(-)向座标
1
8205
OT+check(过行程检查的(+)向座标
1
HA40NC-S&HA43NC-S使用MDS-SVJ2-06的驱动器
HA80NC-S&HA83NC-S使用MDS-SVJ2-10的驱动器
HA100NC-S使用MDS-SVJ2-20的驱动器
I/F诊断(L72)
(1)
(1)---要设定,不然重新开机时不会提示第四轴归原点
M40:
第四轴夹(XE)(Y8);M41:
第四轴松(XF)(Y9)(此条件满足,才可以动作第四轴)
机种
CV系列
主题
三菱
第四轴相关之资料
编
号
M08013
日期:
2008/01/13
纪录:
kevin
3-2.M60系列HF第四轴参数之设定:
参数
马达型号
HF53
HF103
HF153
HF203
HF353
基本参数
1002
axisno
4
1013
axname(轴名称)
A
1014
incax(增量指令轴名称)
1015
cunit(指令单位)
10=1um
1016
iout(英制输出)
0
1017
rot(旋转轴)
1(旋转轴)
1018
ccw(马达旋转方向)
0(顺时针)
1019
dia(直径指定轴)
0
1061
intabs(手动ABS更新)
1
1064
svof(误差修正)
0
1070
axoff(轴取出)
1(轴取出有效)
1089
Cut_RT(旋转轴捷径)(就近回零点位置)
1
轴规格参数
2001
rapid(快速进给)
4000
2002
clamp(切削进给速度钳住机能)
2000
2003
smgst(加速减速模式)
0021
2004
GotL(G0时间常数)
150
2005
Got1(G0时间常数一次延迟)
150
2006
Got2
未使用
2007
G1tL(G1时间常数)
30
2008
G1t1(G1时间常数一次延迟)
30
2009
G1t2
未使用
2010
fwd_g(前馈进给增益)
40
2011
G0back(G0背隙补正)
不定值
2012
G1back(G1背隙补正)
不定值
2013
OT-(软体极限?
-)(设1无角度限制)
1.000
2014
OT+(软体极限?
+)(设1无角度限制)
1.000
2015
Tlml-(TOOLPRESETTER的负方向感测器位置)
0.000
2017
tap_g(攻牙时位置回路增益)
15
2024
Synerr(误差容许值)
0.000
2068
G0fwdg(G00前馈进给增益)
0.000
复归点参数
2025
G28rap(G28快速进给速度)
4000
2026
G28crp(G28接近速度)
200
2027
G28sft(参考点偏移量)
不定值(归原点位置)
2028
grmask(栅点掩蔽量)
0
2029
grspc(栅格量间距)
1:
90设4/1:
120设3/1:
180设2
2030
dir(-)(参考点复归方向)
0
2031
noref(无参考点的轴)
0
2032
nochk(参考点复归是否完成并不检查)
0
2049
type
0(增量式)/2(绝对式)
机种
CV系列
主题
三菱
第四轴相关之资料
编
号
M08013
日期:
2008/01/13
纪录:
kevin
参数
马达型号
HF53
HF103
HF153
HF203
HF353
伺服参数
2201
PC1(马达侧齿轮比)
1
2202
PC2(机械侧齿轮比)
90/120/180
2203
PGN1(位置回路增益1)
26/33
2204
PGN2(位置回路增益1)
70/86
2205
VGN1(速度回路增益1)
50~120
2206
VGN2(速度回路增益2)
0
2207
VIL((速度回路延迟补偿)
0
2208
VIA(速度回路前进补偿)
1900
2209
IQA(电流回路q轴前进补偿)
6144
2210
IDA(电流回路d轴前进补偿)
6144
2211
IQG(电流回路q轴增益)
1024
2212
IDG(电流回路d轴增益)
1024
2213
ILMT1(静态定格电流对应的比例)
500
2214
ILMTsp(静态定格电流对应的比例)
500
2215
FFC(加速度前馈进给增益)
100
2216
LMC1(失位运动补正增益1)
0
2217
SPEC(伺服规格)
绝对值设定1080(光学尺设定0100)
增量式设1000才有办法设定#2225参数
2218
PIT(导螺杆螺距)
360
2219
RNG1(位置检测器分解能)
100
2220
RNG2(速度检测器分解能)
100
2221
OLT(过负荷时间常数)
60
2222
OLL(过负荷检测准位)
150
2223
ODI(误差宽度1)
6
2224
INP(定位宽度值)
50
2225
MTYP(马达型式)
2200
2201
2202
2203
2204
2226
OD2(误差过大辅2)
6
2227
SSF1(特殊伺服机能1)
4230
2229
VCS(速度回路增益下降开始速度)
0
2231
OVS1(过定位补正增益1)
0
2232
TOF(转矩补偿)
0
2233
SSF2(特殊伺服机能2)
0000
2234
SSF3(特殊伺服机能3)
0000
2235
SSF4(特殊伺服机能4)
0000
2236
PTYP(回生电阻型式)
设定1000(没接RB036),1500(有接RB036),
HF103设定1600,HF203,HF353设定1600,V2-8040设定1600
2246
SV046
100
2247
EC1(诱起电压补正)
0
2249
PGN1SP(主轴位置回路增益1)
15
2253
DFBN(误差过大辅3)
100
2257
SHGC(平滑高增益控制定数)
160/187
8201
轴取出(轴要取出设1)
0
8204
OT-check(过行程检查的(-)向座标
1
8205
OT+check(过行程检查的(+)向座标
1
PLC开关8(F12VALID)设ONL81=1显示第四轴[]
I/F诊断(L72)
(1)
(1)---要设定,不然重新开机时,直接按程式起动时,不会提示第四轴归原点的讯息.37.F374-5AXISNOHOME
M40:
第四轴夹(XE)(Y8);M41:
第四轴松(XF)(Y9)?
此条件满足,才可以动作第四轴
机种
CV系列
主题
三菱
第四轴相关之资料
编
号
M08013
日期:
2008/01/13
纪录:
kevin
3-3.M70系列HF第四轴参数之设定:
参数
马达型号
HF54
HF104
HF154
HF204
HF354
基本参数
1002
axisno
4
1013
axname(轴名称)
A
1014
incax(增量指令轴名称)
A
1015
cunit(指令单位)
10=1um
1016
iout(英制输出)
0
1017
rot(旋转轴)
1(旋转轴)
1018
ccw(马达旋转方向)
0(顺时针)OR1(逆时针)
1019
dia(直径指定轴)
0
1020
sp_ax(主轴补间)
0
1021
mcp_no(驱动器单元I/F通道No.)
1004(主轴#3031=1005)
1022
axname2(第2轴名称)
A
1070
axoff(轴取出)
1(轴取出有效)
轴规格参数
2001
rapid(快速进给)
4000
2002
clamp(切削进给速度钳住机能)
2000
2003
smgst(加速减速模式)
0021
2004
GotL(G0时间常数)
150
2005
Got1(G0时间常数一次延迟)
100
2006
Got2
100
2007
G1tL(G1时间常数)
30
2008
G1t1(G1时间常数一次延迟)
30
2009
G1t2
30
2010
fwd_g(前馈进给增益)
45
2011
G0back(G0背隙补正)
不定值
2012
G1back(G1背隙补正)
不定值
2013
OT-(软体极限?
-)(设1无角度限制)
1.000
2014
OT+(软体极限?
+)(设1无角度限制)
1.000
2017
tap_g(攻牙时位置回路增益)
15
复归点参数
2025
G28rap(G28快速进给速度)
4000
2026
G28crp(G28接近速度)
200
2027
G28sft(参考点偏移量)
不定值(归原点位置)
2028
grmask(栅点掩蔽量)
0
2029
grspc(栅格量间距)
1:
90设4/1:
120设3/1:
180设2
2030
dir(-)(参考点复归方向)
0
2049
type
0(增量式)/2(绝对式)
2074
H/W_OT+(H/WOT+)
021B
机种
CV系列
主题
三菱
第四轴相关之资料
编
号
M08013
日期:
2008/01/13
纪录:
kevin
参数
马达型号
HF54
HF104
HF154
HF204
HF354
SVJ3
V1
SVJ3
V1
SVJ3
V1
SVJ3
V1
SVJ3
V1
伺服参数
2201
PC1(马达侧齿轮比)
1
2202
PC2(机械侧齿轮比)
90/120/180
2203
PGN1(位置回路增益1)
33/47
2204
PGN2(位置回路增益1)
86/125
2205
VGN1(速度回路增益1)
80~120
2206
VGN2(速度回路增益2)
0
2207
VIL((速度回路延迟补偿)
0
2208
VIA(速度回路前进补偿)
1900
2209
IQA(电流回路q轴前进补偿)
20480
20480
15360
10240
15360
10240
8192
8192
6144
8192
2210
IDA(电流回路d轴前进补偿)
20480
20480
15360
10240
15360
10240
8192
8192
6144
8192
2211
IQG(电流回路q轴增益)
3072
3072
2560
1280
2560
1536
3072
2048
2048
2048
2212
IDG(电流回路d轴增益)
3072
3072
2560
1280
2560
1536
3072
2048
2048
2048
2213
ILMT1(静态定格电流对应的比例)
800
2214
ILMTsp(静态定格电流对应的比例)
800
2215
FFC(加速度前馈进给增益)
100
2216
LMC1(失位运动补正增益1)
0
2217
SPEC(伺服规格)
绝对值设定1080(光学尺设定0100)
增量式一定要设0000,才有办法设定#2225参数
2218
PIT(导螺杆螺距)
360
2219
RNG1(位置检测器分解能)
1000
2220
RNG2(速度检测器分解能)
1000
2221
OLT(过负荷时间常数)
60
2222
OLL(过负荷检测准位)
150
2223
ODI(误差宽度1)
6
2224
INP(定位宽度值)
50
2225
MTYP(马达型式)
2203
2204
2205
2207
2208
2226
OD2(误差过大辅2)
6
2227
SSF1(特殊伺服机能1)
4000
2236
PTYP(回生电阻型式)
接1支RB03626Ω设定1000
2246
SV046
100
2247
EC1(诱起电压补正)
100
2249
PGN1SP(主轴位置回路增益1)
15
2253
DFBN(误差过大辅3)
100
2257
SHGC(平滑高增益控制定数)
187/281
8201
轴取出
0(轴要取出设1)
8204
OT-check(过行程检查的(-)向座标
1
8205
OT+check(过行程检查的(+)向座标
1
8213
旋转轴型式
1(旋转捷径有效)
PLC开关8(F12VALID)设ONL81=1显示第四轴[]
I/F诊断(L72)
(1)
(1)---要设定,不然重新开机时,直接按程式起动时,不会提示第四轴归原点的讯息.37.F374-5AXISNOHOME
M40:
第四轴夹(X20E)(Y208);M41:
第四轴松(X20F)?
此条件满足,才可以动作第四轴


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 三菱 第四 参数
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《阿凡达》观后感.docx
《阿凡达》观后感.docx
-
《大中专毕业生就业指导》课程教学大纲.docx
-
《建设工程合同》复习题及答案.docx
-
《蜡烛》上课教学方案设计12.docx
-
《奇妙的对联》教案解析.docx
-
《水浒传》30个主要情节概述.docx
-
《36岁儿童学习与发展指南》读书笔记.docx
-
《财务管理》习题及答案.docx
-
《多媒体技术》期末考试复习题及参考答案.docx
-
《现代推销技术》课程标准简版.docx
-
《园林绿化先进个人先进事迹材料》.docx
-
#《预防医学》题目答案汇总.docx
-
《爱的教育》读后感多篇.docx
-
《登泰山记》综合复习题及答案必修上册.docx
-
《江雪》教案.docx
-
《第4章一次函数》单元测试2含答案解析.docx
-
《铁路旅客运输规程》.docx
-
《小学语文生活化教学的研究》课题.docx
-
《证券投资基金基础知识》.docx
-
#3 汽机房设备及管道保温作业指导书.docx
-
《勃兰特下跪赎罪受到称赞》备课资料第一个向犹太人下跪赔罪的德国总理勃兰特维利访谈录.docx
-
《国际贸易术语解释通则》中文版.docx
-
《教育社会学》课程教案.docx
-
《老人与海》好词好句.docx
-
《钳工技能训练》实训教案.docx
-
1第一单元位置与方向导学案.docx
-
3篇关于校园电子竞技比赛活动策划书.docx
-
007质量部岗位说明书.docx
-
《工程现场施工安全事故应急救援预案》的管理章程办法.docx
-
《Web程序设计一课程设计》.docx
-
《打火匣》读后感.docx
-
《家政须知》.docx
-
一年级上册地方教案Word格式.docx
-
人教版四年级数学下册运算定律练习题 244Word格式文档下载.docx
-
韶关市小学毕业小升初模拟数学试题65附详细答案附答案Word格式文档下载.docx
-
优质最新语文S版小学四年级下册教学实录五彩池Word文档下载推荐.docx
-
一体化经营下的全球管理控制机制沃尔玛Word格式文档下载.docx
-
深圳市住房公积金管理暂行办法文档格式.docx
-
我有一个好爸爸作文500字Word文件下载.docx
-
试谈医药营销中的沟通技巧Word文档格式.docx
-
生活中的DNA科学作业答案Word文件下载.docx
-
人教版一年级下册语文《识字1》教案 二Word下载.docx
 社保政策下的合理用药优质PPT.ppt
社保政策下的合理用药优质PPT.ppt
-
人教部编版八年级历史下册全册知识点总结Word格式文档下载.docx
-
深圳租赁合同范本标准版Word文档下载推荐.docx
-
任润厚副省长在全省安全生产工作会议上的讲话Word格式文档下载.docx
-
历年英语二真题阅读翻译0106Word文档下载推荐.docx
-
实用参考TSM日常维护手册Word文档下载推荐.docx
-
辽宁省大连市初中英语毕业升学模拟考试题一扫描版Word文档下载推荐.docx
-
三利参考资料农场项目区扩出设计Word文件下载.docx
-
高二物理知识点总结大全Word格式文档下载.docx
