 第6章 金属及合金的塑性变形.docx
第6章 金属及合金的塑性变形.docx
- 文档编号:12742634
- 上传时间:2023-04-21
- 格式:DOCX
- 页数:14
- 大小:172.57KB
第6章 金属及合金的塑性变形.docx
《第6章 金属及合金的塑性变形.docx》由会员分享,可在线阅读,更多相关《第6章 金属及合金的塑性变形.docx(14页珍藏版)》请在冰豆网上搜索。
第6章金属及合金的塑性变形
第6章金属及合金的塑性变形
6-1金属的变形特性
金属在外力作用下的变形行为可用拉伸曲线来描述。
设拉力为P,试样伸长量为dl,则应力σ和应变ε分别为:
;
式中,A为试样的截面积。
在拉伸过程中,A和l是变化的,在工程上,为了简化问题,A常用A0来代替,ε也用平均值表示ε=(l-l0)/l0,这样测得的σ-ε曲线称工程σ-ε曲线。
一、工程σ-ε曲线
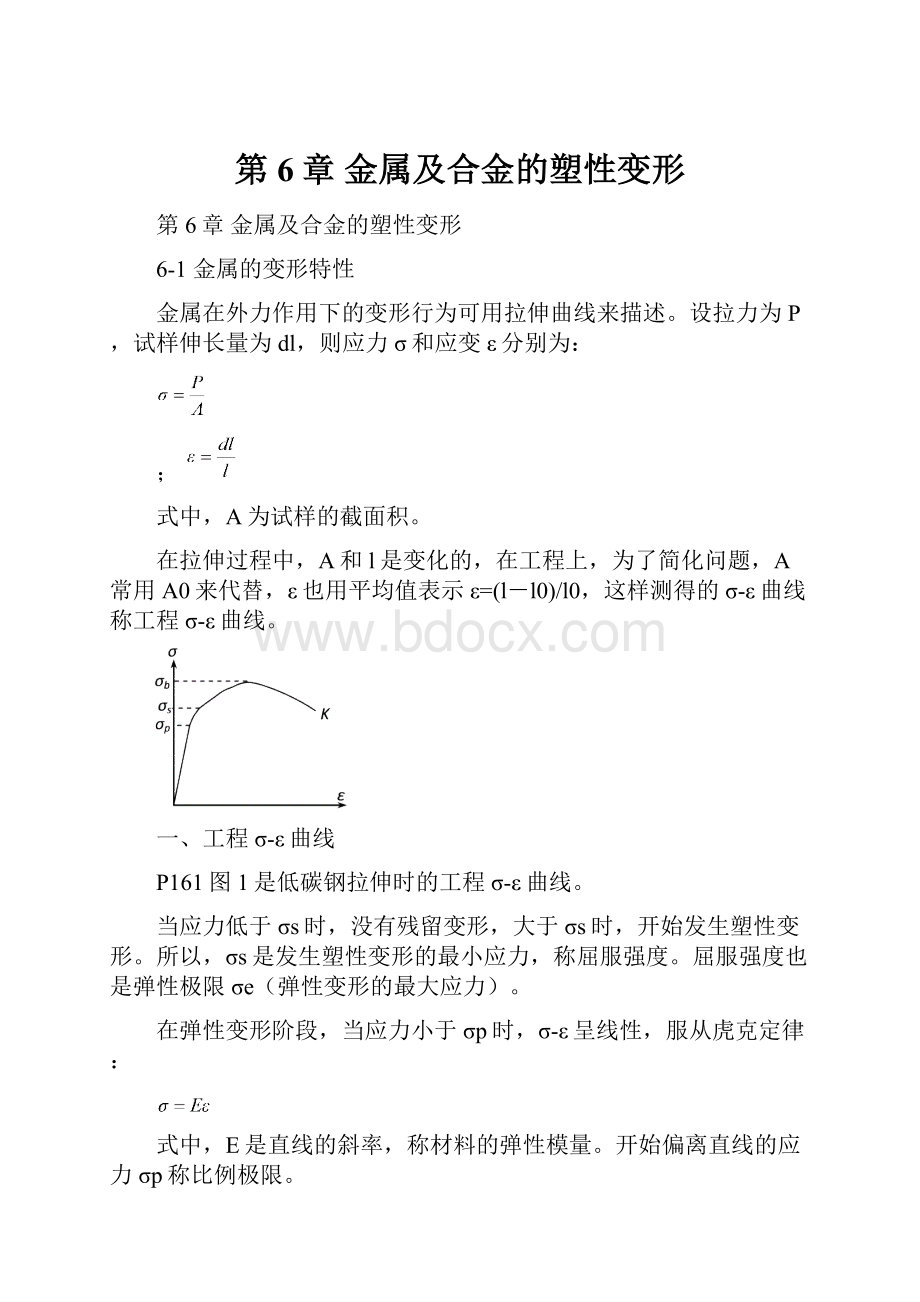
P161图1是低碳钢拉伸时的工程σ-ε曲线。
当应力低于σs时,没有残留变形,大于σs时,开始发生塑性变形。
所以,σs是发生塑性变形的最小应力,称屈服强度。
屈服强度也是弹性极限σe(弹性变形的最大应力)。
在弹性变形阶段,当应力小于σp时,σ-ε呈线性,服从虎克定律:
式中,E是直线的斜率,称材料的弹性模量。
开始偏离直线的应力σp称比例极限。
当应力超过σs时,开始发生塑性变形。
随着塑性变形的增加,应力增大,这种现象称加工硬化。
当应力达到最大值σb时,开始下降,直到断裂。
最大值σb称材料的抗拉强度。
超过此值,试样发生局部颈缩,即发生了不均匀塑性变形。
所以,σb是材料发生均匀塑性变形的最大应力。
注意,应力超过σb后下降,并不是加工硬化失效。
在结构材料中,我们关心的力学指标是σs和σb,它们和硬度一起称做强度指标。
在实际应用中,σs值是无法测量的,通常用发生0.2%塑性变形时对应的应力值来表示屈服强度,称条件屈服强度。
通常我们所说的材料的力学性能,除了上述强度指标外,还有两个塑性指标,延伸率、断面收缩率。
延伸率是指发生断裂时,试样的伸长率:
断面收缩率是指发生断裂时,试样截面积的变化率:
二、真应力-真应变曲线(
曲线)
工程应力与真实应力之间的不同是容易发现的。
下面看看工程应变与真实应变的不同。
拉伸一个试样,使其伸长一倍,则工程应变
;若是压缩,要获得同样数值的负应变,理应压缩到原长度的一半。
但按此算得
两者不符,必须压缩到高度为0才能得到-1应变值。
这显然是不对的。
问题在哪儿呢?
(一)真应变的计算
实际上,按工程应变计算的是相对于原长度的平均应变,不是真实的应变值。
实际变形过程中,试样的长度在变化,每个瞬间的应变值应由该时刻的实际长度来决定。
这样,在拉伸时,不同时刻每伸长同样的增量dl,相应的应变增量就越来越小;而压缩时应变增量越来越大。
由此可知,要得到真应变,必须按瞬时长度来计算,即
按此计算,拉伸时
;压缩时
。
假设有两种拉伸,一种是将l0一次拉伸到12;第二种是l0→l1→12。
则
第一种:
;
第二种:
;
在出现颈缩前,
和
之间有如下关系:
∵
,即
∴
εT
0.01
0.10
0.20
0.50
1.0
4
ε
0.01
0.105
0.22
0.65
1.72
53.6
ε-εT
0
0.005
0.02
0.15
0.72
49.6
可见,当变形很小时,两者相差不大,变形量增大,其差别就显著。
(二)真应力的计算
在发生颈缩前,根据拉伸体积不变:
,则
可见,在拉伸时,真应力大于工程应力;压缩时真应力小于工程应力。
在弹性变形阶段,ε极小,两者基本一致,没必要区分;但在塑性变形阶段,两者差别很明显。
(三)
曲线(P163图3)
6-2单晶体的塑性变形
一、滑移
(一)滑移带和滑移线
将拉伸试样表面经过抛光处理后进行拉伸变形,然后在显微镜下观察,可以看到,在抛光面上有许多平行的线条(P165图4)。
进一步研究发现,在每一线条两侧为同一晶体结构,且具有相同的晶体取向,说明塑性变形没改变晶体的结构和取向。
由此得出结论:
这些平行线条是晶体沿某些晶面发生滑移产生的台阶,称滑移带。
这种变形方式称滑移变形。
在电子显微镜下作高倍观察,发现每条滑移带都是由许多更细小的平行线组成(图5),称滑移线。
计算表明,每条滑移线产生的台阶是由大量位错移出晶体造成的。
滑移带的特征说明晶体塑性变形具有微观不均匀性,滑移集中发生在一些晶面上,在两条滑移带之间的晶体未产生变形,只作整体相对位移。
(二)滑移系
研究发现,发生滑移变形时,滑移总是在一定的晶面上,沿着一定的方向进行的,分别称滑移面和滑移方向。
通常,滑移面往往是密排面,滑移方向是密排方向。
一个滑移面和该面上的一个滑移方向构成一个滑移系,它表示晶体滑移的一个可能空间取向。
滑移变形是金属的主要变形方式,所以,滑移系越多,金属的塑性越好。
例如,面心立方金属的滑移系是{111}<110>,共有4×3=12个;密排六方金属的滑移系是(0001)<
>,只有1×3=3个;体心立方金属的滑移系是{110}<111>,有6×2=12个。
所以,密排六方金属的塑性较差,如Zn、Mg;而面心立方结构的Au、Ag、Cu、Al塑性较好。
研究发现,体心立方结构的Fe,除了12个{110}<111>主滑移系外,还有12个{112}<111>、24个{123}<111>潜在的滑移系。
塑性的好坏也不完全取决于滑移系的数量。
例如,Fe的滑移系较多,有48个,但其塑性不如面心立方结构的Au、Ag、Cu、Al,说明塑性还与滑移方向的数量、滑移面原子密排程度等有关。
(三)滑移的临界分切应力
滑移只有在切应力的作用下才能进行。
滑移存在晶格阻力,只有当滑移系方向的分切应力达到某一临界值时才能进行滑移,此分切应力称滑移的临界分切应力。
由P167图6可知:
式中,m称取向因子。
当应力达到
时,对应临界分切应力
:
注意:
对于确定的材料,
是常数。
所以,
值与取向因子有关,它反映了单晶体的各向异性(P167图7)。
当m=0时(
或
),
,称硬取向。
当m=0.5时(如
),
最小,称软取向。
(四)滑移时晶体的转动
拉伸情况下晶体的转动见图8:
滑移系趋向与拉伸轴平行,成为硬取向。
(五)多滑移
晶体中的滑移系不止一个,它们在空间的取向各不相同。
随着外力的增大,取向最有利的滑移系(软取向)将最先达到滑移的临界分切应力值,开始滑移。
随着滑移的进行,该滑移系逐渐由软取向向硬取向变化,甚至停止滑移。
同时,原来的硬取向滑移系可能变成软取向而开始滑移,如此交替进行。
这种在两个或多个滑移系上同时或交替进行的滑移称多系滑移,简称多滑移。
发生多滑移时,可在抛光表面看到交叉的滑移带(P168图11)。
(六)交滑移
对于螺位错,由于其柏氏矢量与位错线平行,所以,滑移面交多,但通常仍在软取向的滑移系上(密排面的密排方向)首先发生滑移。
但是,在滑移过程中,若由于某种原因使滑移受阻,则在较大的应力下,该螺位错可在另一个滑移面上,沿相同的滑移方向继续滑移,这种滑移方式称交滑移。
发生交滑移时,可在抛光表面看到曲折状的滑移带(P169图13)。
(七)滑移的位错机制
在第1章中我们已经介绍过,晶体的滑移不是整体的刚性切变,而是通过位错运动实现的。
既然滑移需要达到临界分切应力才能进行,说明位错运动有阻力。
对纯金属单晶体来说,包括点阵阻力、位错之间的相互作用产生的阻力;位错与点缺陷作用产生的阻力等。
这些阻力决定了纯金属单晶体的屈服强度和流变应力。
1、位错运动的点阵阻力
以刃位错为例,其运动过程是多余半原子面从一个平衡位置向临近的另一平衡位置移动的过程。
此过程有一中间过渡态,能量升高,产生位错移动的阻力。
这一阻力称派-纳力:
式中,a、b为滑移面间距和滑移方向原子间距;v是泊桑比。
2、为错的交割
1)两个刃位错的交割
a、柏氏矢量相互垂直:
1个刃型割阶,可动。
b、柏氏矢量相互平行:
2个螺型扭折,不影响位错运动。
2)刃位错和螺位错的交割
产生2个割阶,刃位错上的割阶可动;螺位错上的割阶不可动
3)两个螺位错的交割(规律同上,略)
4)结论
刃位错上的割阶可动,螺位错上的割阶不可动。
二、孪生
孪生是塑性变形的另一种方式。
(一)孪生变形的概念
孪生变形是指晶体的一部分相对于另一部分发生了均匀切变,构成镜面对称的位向关系。
变形部分的结构并未改变,只是取向发生了变化,与未变形部分互为孪晶(变形孪晶)。
孪晶之间的界面是共格界面,即孪晶面,也称孪生面。
(二)孪生面和孪生方向
面心立方晶体的孪生面和孪生方向通常是{111}<112>;
体心立方晶体的孪生面和孪生方向通常是{112}<111>;
密排六方晶体的孪生面和孪生方向通常是{
}<
>
可见,孪生面和孪生方向不一定是滑移面和滑移方向,即孪生面和孪生方向不是滑移系。
(三)孪生的机制
孪生的另一个特点是在均匀切变部分,相邻晶面之间,沿孪生方向的位移量是孪生面间距的分数值。
说明孪生时,每层晶面的位移应是一个不全位错的移动造成的。
问题是,这种情况如何产生?
以面心立方为例,设孪生面和孪生方向是(111)[
],见P173图20。
(111)是密排面,孪生时相邻(111)面的相对位移是
,这正是面心立方中肖克莱不全位错的柏氏矢量。
若位错是按图a分布的,当这些刃位错移动到图b时,正好形成了孪生区。
那么,这种位错分布如何实现呢?
一般认为,可能是由位错增殖的极轴机制来实现的。
如图,假定有一个位错线垂直穿过(111)面的极轴位错,其柏氏矢量具有螺型分量
(即等于密排面间距),此螺位错使(111)面螺旋上升。
若(111)面上的不全位错
的一端被极轴固定,则不全位错只能绕极轴转动,每扫过圈就产生一个单原子层的孪晶,这样不断转动就形成孪生变形区。
(四)孪生变形的地位和作用
发生孪生变形时,孪生面和孪生方向不是滑移系,点阵阻力(派-纳力)较大,所以孪生变形需要在较大的切应力作用下才能发生。
事实上,在应力还没有达到孪生变形所需要的最小切应力时,滑移系已达到临界分切应力,并开始滑移,所以滑移是塑性变形的主要方式。
随着滑移变形的进行,材料发生加工硬化,继续变形需不断增加应力。
当应力增大到一定值时可能发生孪生变形。
虽然孪生变形对塑性变形的贡献量是有限的,但由于它改变了晶体的取向,使那些因滑移而变成硬取向的滑移系变回到软取向,滑移得以重新进行。
孪生变形时经常发出声音,说明孪生变形的速度很快,可以达到声速。
一般认为滑移的速度相对较慢。
所以,对于塑性较好的面心立方和体心立方晶体主要以滑移变形为主,很少看到变形孪晶;而对于滑移系很少,塑性较差的密排六方晶体,经常可看到变形孪晶。
但是,塑性较好的面心立方和体心立方晶体,在低温或冲击载荷作用下,滑移变形受阻,经常可看到变形孪晶。
可见,孪生变形是在滑移变形受阻时的一种辅助变形方式。
6-3多晶体的塑性变形
在工业上广泛使用的金属材料都是多晶体。
一、多晶体变形的特点
研究发现,位错在晶体中滑移时不能穿越晶界,只能在晶界前沿塞积。
分析认为,在多晶体中,晶粒的取向不同,各个晶粒中的滑移系也具有不同的取向。
在外力作用下,总有一些晶粒中的一些滑移系处于容易滑移的软取向,这些滑移系首先开始滑移。
当位错滑移到晶界时,相邻晶粒的取向不同,位错无法越过晶界。
事实上,位错也不能移出晶粒到达晶界,否则材料将不连续。
所以,在相邻晶粒的滑移系没有启动之前,位错只能在晶界前沿塞积。
位错塞积使后面的位错运动阻力增大,需增大外力使之继续发生滑移。
这样,位错塞积数量逐渐增大。
位错周围有应力场,位错塞积群的应力和不断增加的外应力和在一起并达到一定数值时,就有可能使相邻晶粒的滑移系达到临界分切应力而开始滑移。
该晶粒中位错的滑移情况也同上面一样,位错只能在晶界前沿塞积。
无论位错塞积数量多大,只要不移出晶粒,该晶粒就无塑性变形。
所以,晶体的连续性对多晶体变形提出了要求:
所有晶粒必须同时发生变形,且必须是协调变形。
协调变形要求一些较硬取向也要参与滑移,所以多晶体金属具有较高的强度,见P175图22。
理论研究表明,发生协调变形要求晶体至少具有5个独立的滑移系。
这对于面心立方金属或体心立方金属来说容易满足,所以其塑性较好;对于密排六方金属来说就根本无法满足,所以其塑性很差。
二、晶粒大小的影响
屈服强度是反映材料抵抗塑性变形能力的强度指标。
研究发现,晶粒大小对屈服强度的影响满足霍尔-配奇公式:
材料一定时,
和K是常数。
定性的说,晶粒越大,位错塞积群距离位错源越远,应力对位错源的抑制作用就越小,位错塞积数量就越多,位错塞积群的合应力就越大,越容易使相邻晶粒的滑移系启动,所以屈服强度越低。
研究还发现,晶粒越细小,材料的塑性越好。
一般认为,这与变形的微观均匀性有关。
多晶体塑性变形时,每个晶粒内部的位错分布是不均匀的(有人把这看作是变形不均匀),晶粒越大,这种不均匀就显得更大;反之也然。
三、低碳钢的屈服现象
低碳钢的屈服现象本属于合金的变形特性,但通常工业中使用的合金钢强度较高,往往不出现低碳钢的屈服现象,而在工业纯铁中却往往可以看到,所以放在这里介绍。
柯氏气团(微量C、N原子)对位错的钉扎作用。
6-4合金的塑性变形
合金的组成相可分为固溶体和化合物两大类,固溶体相通常作为合金的主要组成相,数量较多,常称其为基体;化合物主要作为强化相,数量较少,一般希望它细小而弥散的分布在基体上,故常称作第二相。
一、固溶强化
以纯金属为溶剂,加入其它元素的溶质原子形成固溶体。
研究发现,固溶体的强度比纯金属的高(塑性低),并且,随着溶质含量的增加,固溶体的强度逐渐增加,这种现象称固溶强化。
间隙原子的强化作用通常比置换原子大。
溶质原子属于点缺陷,造成晶格畸变,其应力场阻碍位错运动,增大变形阻力。
二、弥散分布的第二相强化
第二相多数情况下是化合物,硬而脆。
若呈连续网状分布,合金的塑性几乎为0,所以,要设法使其弥散分布。
弥散分布的第二相强化分两种强化机制:
(一)不可变形第二相的强化(P179图27)
(二)可变形第二相的强化(滑移阻力不同、增加界面)P180图28。
6-5塑性变形对金属组织和性能的影响
一、对组织的影响
(一)显微组织的变化(金相组织)
晶粒形状变化,纤维组织。
(二)亚结构的变化(电镜组织)
位错密度增加,位错分布情况与变形量和材料性质有关。
对层错能高的金属,位错移动性好,随着变形量增加,位错密度增加;进而形成位错缠结,位错分布变得不均匀;进而形成胞状亚结构,高密度缠结位错形成胞壁,胞与胞之间有微小位向差;进而胞的数量增加,尺寸减小,位向差逐渐增加。
变形量较大时,胞的形状也随晶粒形状变化。
上述情况下,位错分布的不均匀性大。
但对层错能低的金属,位错移动性差,容易形成位错塞积,即使变形量较大也不容易形成位错缠结和胞状亚结构,而是杂乱排列于晶体中,构成复杂的网络,呈较为均匀的分布。
(三)变形织构
塑性变形量较大时,金属的晶粒具有择优取向,称变形织构。
包括丝织构和板织构。
二、对性能的影响
(一)加工硬化(P183图32)
(二)各向异性(制耳)P182图31。
三、残留应力
(一)宏观内应力(第一类内应力):
应力在宏观尺度上达到平衡
(二)微观内应力(第二类内应力):
应力在晶粒尺度上达到平衡
四、点阵畸变
位错、点缺陷增加,产生点阵畸变,其应力场作用范围较小,称第三类内应力。
金属经塑性变形后,部分机械能被储存在变形金属内。
在总储存能中,残留内应力的弹性应变能只占5-10%,决大部分属于点阵畸变能。
在点阵畸变能中,主要是生成大量位错引起的能量升高,约占总储存能的80-90%。
可见,塑性变形使金属能量升高,处于热力学不稳定状态,是回复和再结晶的驱动力。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第6章 金属及合金的塑性变形 金属 合金 塑性变形
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《阿凡达》观后感.docx
《阿凡达》观后感.docx
-
《大中专毕业生就业指导》课程教学大纲.docx
-
《建设工程合同》复习题及答案.docx
-
《蜡烛》上课教学方案设计12.docx
-
《奇妙的对联》教案解析.docx
-
《水浒传》30个主要情节概述.docx
-
《36岁儿童学习与发展指南》读书笔记.docx
-
《财务管理》习题及答案.docx
-
《多媒体技术》期末考试复习题及参考答案.docx
-
《现代推销技术》课程标准简版.docx
-
《园林绿化先进个人先进事迹材料》.docx
-
#《预防医学》题目答案汇总.docx
-
《爱的教育》读后感多篇.docx
-
《登泰山记》综合复习题及答案必修上册.docx
-
《江雪》教案.docx
-
《第4章一次函数》单元测试2含答案解析.docx
-
《铁路旅客运输规程》.docx
-
《小学语文生活化教学的研究》课题.docx
-
《证券投资基金基础知识》.docx
-
#3 汽机房设备及管道保温作业指导书.docx
-
《勃兰特下跪赎罪受到称赞》备课资料第一个向犹太人下跪赔罪的德国总理勃兰特维利访谈录.docx
-
《国际贸易术语解释通则》中文版.docx
-
《教育社会学》课程教案.docx
-
《老人与海》好词好句.docx
-
《钳工技能训练》实训教案.docx
-
1第一单元位置与方向导学案.docx
-
3篇关于校园电子竞技比赛活动策划书.docx
-
007质量部岗位说明书.docx
-
《工程现场施工安全事故应急救援预案》的管理章程办法.docx
-
《Web程序设计一课程设计》.docx
-
《打火匣》读后感.docx
-
《家政须知》.docx
 小学奥数年龄问题详解PPT资料.pptx
小学奥数年龄问题详解PPT资料.pptx
-
汇编浅析经营综合报告9Word文件下载.doc
-
永久基本农田划定技术方案Word文档格式.doc
-
电视真人秀活动策划案PPT资料.ppt
-
汇水井施工方案Word下载.docx
-
永州市示范性中等职业学校20082009年度项目建设情况报告书Word下载.doc
-
汇编浅析绍兴市科技计划项目合同书计划编Word下载.doc
-
小学六年级毕业作文集PPT课件下载推荐.ppt
-
小学四年级作文我喜欢的小动物PPT格式课件下载.ppt55PPT格式课件下载.ppt
-
水闸评定表范例Word文档下载推荐.doc
-
汇编浅析结构化面试体系的实施规范化Word下载.doc
-
永发沥青砼路面施工方案Word格式.doc
-
电解二厂组装职工创新PPT资料.ppt
-
汇编浅析第五章绩效考评Word下载.doc
-
汇丰大厦主楼外脚手架专项方案Word下载.doc
-
小学四年级北师大版作文指导:我收获了PPT文档格式.ppt
-
小学四年级写人作文指导PPT文档格式.ppt
-
小学四年级奥数教程第十三讲优质PPT.ppt
-
小学学校德育工作汇报2016.102013PPT资料.ppt
