 精选医学实验16DH6001超声定位综合实验仪doc.docx
精选医学实验16DH6001超声定位综合实验仪doc.docx
- 文档编号:12680613
- 上传时间:2023-04-21
- 格式:DOCX
- 页数:24
- 大小:634.08KB
精选医学实验16DH6001超声定位综合实验仪doc.docx
《精选医学实验16DH6001超声定位综合实验仪doc.docx》由会员分享,可在线阅读,更多相关《精选医学实验16DH6001超声定位综合实验仪doc.docx(24页珍藏版)》请在冰豆网上搜索。
精选医学实验16DH6001超声定位综合实验仪doc
实验16超声定位和形貌成像实验
一、概述
1、超声定位的基本原理
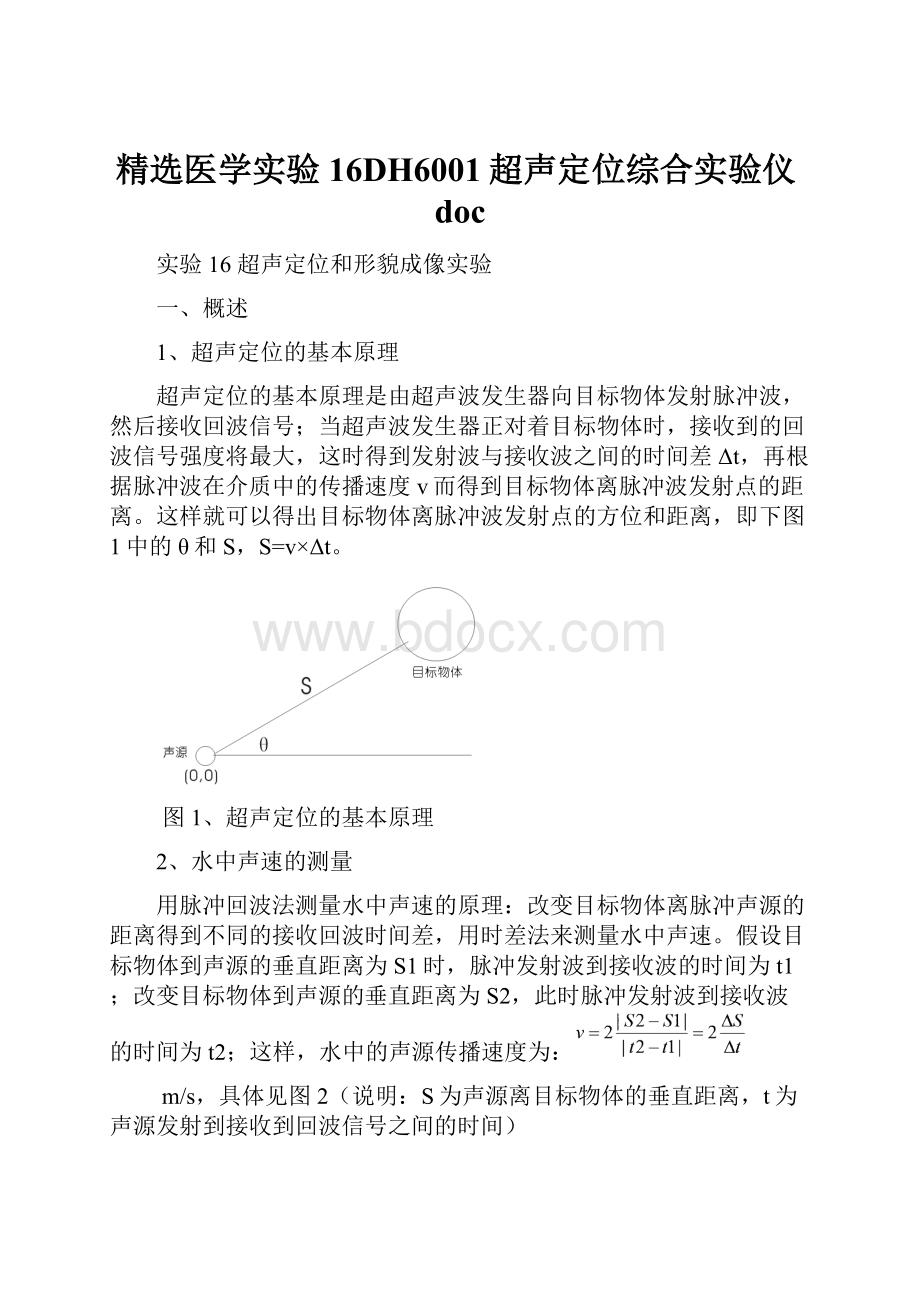
超声定位的基本原理是由超声波发生器向目标物体发射脉冲波,然后接收回波信号;当超声波发生器正对着目标物体时,接收到的回波信号强度将最大,这时得到发射波与接收波之间的时间差Δt,再根据脉冲波在介质中的传播速度v而得到目标物体离脉冲波发射点的距离。
这样就可以得出目标物体离脉冲波发射点的方位和距离,即下图1中的θ和S,S=v×Δt。
图1、超声定位的基本原理
2、水中声速的测量
用脉冲回波法测量水中声速的原理:
改变目标物体离脉冲声源的距离得到不同的接收回波时间差,用时差法来测量水中声速。
假设目标物体到声源的垂直距离为S1时,脉冲发射波到接收波的时间为t1;改变目标物体到声源的垂直距离为S2,此时脉冲发射波到接收波的时间为t2;这样,水中的声源传播速度为:
m/s,具体见图2(说明:
S为声源离目标物体的垂直距离,t为声源发射到接收到回波信号之间的时间)
图2、时差法测量水中声速
3、超声成像的基本原理
超声成像(ultrasonicimaging)是使用超声波的声成像。
它包括脉冲回波型声成像(pulseechoacousticalimaging)和透射型声成像(transmissionacousticalimaging)。
前者是发射脉冲声波,接收其回波而获得物体图像的一种声成像方法;后者是利用透射声波获得物体图像的声成像方法。
目前,在临床应用的超声诊断仪都是采用脉冲回波型声成像。
而透射型声成像的一些成像方法仍处于研究之中,如某些类型的超声CT成像(computedtomographybyultrasound)。
目前研究较多的有声速CT成像(computedtomographyofacousticVelocity)和声衰减CI成像(computedtomographyofacousticattenuation)。
本实验以脉冲回波型超声成像(也称反射式超声成像)为研究对象,来研究介绍和研究超声成像。
也就是利用超声波照射物体,通过接收和处理载有物体组织或结构性质特征信息的回波,获得物体组织性质与结构的可见图像的方法和技术。
它与其他成像技术相比,有自己独特的优点,例如装置较为简明、直观,容易理解成像的原理;没有放射性,实验者可以自己进行不同物体的形貌成像实验。
4、超声成像的一般规律
所有脉冲回波型声成像凭借回声来反映物体组织的信息,而回声则来自组织界面的反射和散射体的后散射。
回声的强度取决于界面的反射系数、粒子的后散射强度和组织的衰减。
物体组成界面的组织之间声阻抗差异越大,则反射的回声越强。
反射声强还和声束的入射角度有关,入射角越小,反射声强越大,声束垂直于入射界面时,即入射角为零时,反射声强最大,而入射角为90度时,反射声强为零。
物体组织对声能的衰减取决于该组织对声强的衰减系数和声束的传播距离(即检测深度)。
物体衰减特征主要表现在后方的回声。
多重反射超声遇强反射界面,在界面后出现一系列的间隔均匀的依次减弱的影像,称为多次反射,这是声束在探头与界面之间往返多次而形成。
二、实验目的
1、了解脉冲回波型声成像的原理。
2、掌握脉冲回波型声成像实验仪的使用方法。
3、观察脉冲回波波形。
4、利用脉冲回波测量水中声速。
5、应用脉冲回波法对目标物体进行定位。
6、应用脉冲回波法来研究物体的运动状态。
7、利用脉冲回波型声成像实验仪对给定目标物体进行扫描成像实验。
三、实验仪器
DH6001超声定位综合实验仪由以下部分组成:
DH6001超声定位综合实验仪、超声换能器、DH6001-MC直流电机控制器、水槽与测试架、VC++电脑数据处理软件、数据线以及电脑(自备)。
图3DH6001超声定位综合实验仪
1、DH6001超声定位综合实验仪技术参数以及使用说明
◆实验仪采用DSP处理器,采样频率12.5M。
◆超声波传感器工作频率:
2.5MHz,收发一体式。
◆超声波传感器与定位/成像物体的距离:
7cm—80cm。
◆定位指标:
水平距离精度:
≤2.5cm;
方位精度:
≤2.5º。
◆仪器提供RS232接口,与电脑相连。
◆可以完成的实验内容:
回波波形观察;物体运动速度的测量;目标物体定位;扫描成像实验:
包括物体表面形貌成像以及断面像(剖面像)。
图4DH6001-MC直流电机控制器
2、DH6001-MC直流电机控制器技术参数以及使用说明
◆采用直流减速电机控制成像扫描速度以及提供目标物体的运动速度。
◆仪器提供四组速度,复位运行时,速度最大;在电机停止时,按“停止+正向”键或者按“停止+反向”键来改变电机的运行速度。
◆提供限位保护接口和电机控制接口,与测试架相连。
◆注意:
仪器启动时,确保测试架上的滑块在导轨的中间位置,即处在两个限位行程开关之间,以提供一个初始位置。
建议每次实验完毕后,启动电机,把滑块停在导轨中间处,方便下组学生实验。
如果电机越限失控(当行程撞块始终触碰行程开关时),可以用十字螺丝刀松开皮带,把滑块小心移动到导轨中间即可(电机的减速比较大,不能用手强行转动)。
若初次启动电机时,发现滑块停在行程开关外面,可以按“正向”或“反向”键,使滑块运行到两限位行程开关之间后“停车”,按“复位”后即可可控运行。
正常的运行状态是:
在两限位行程开关之间,电机可以正反运动控制;按“正向”,滑块向“右”运行;按“反向”,滑块向“左”运行;按“停止”,滑块停止。
按“正向”键向“右”运行时,越限右限位行程开关后,电机将停止运行,此时只能按“反向”键向“左”运行。
按“反向”键向“左”运行时,越限左限位行程开关后,电机将停止运行,此时只能按“正向”键向“右”运行。
1、撑线杆2、角度旋转座3、导轨4、行程撞块5、滑块
6、电机座7、旋转梁8、定位物体9、换能器固定座(测速时用于放置超声换能器)
10、吊杆11、固定座(用于放置超声换能器或运动目标物体)12、右行程开关
13、直流减速电机14、主动轮15、电机控制插座16、限位插座17、标尺
18、指针19、从动轮20、左行程开关21、载物台22、水槽23、底板
图5测试架正视图以及俯视图
3、软件界面
功能描述:
读数据/存数据:
对采集数据进行读取和存储。
工作方式:
共提供成像采集,定位,测速以及波形四种工作方式。
工作状态显示窗:
指示当前的工作方式。
清除显示:
用于清除显示的波形或成像图。
成像操作功能:
对采集的数据进行成像处理,处理的时候可以按增加门限或减小门限来调整成像图。
信号放大/信号减小:
对接收信号的显示强度进行放大和缩小。
串口通讯:
用于启动和关闭通讯口,启动后串口状态显示OK!
!
或END,关闭后显示Close!
!
。
坐标点一/坐标点二:
显示坐标点的具体坐标,分别对应时间和距离,表示该时
刻超声传感器扫过物体时对应的垂直距离。
平均速度:
两坐标点之间的平均速度。
图6、软件界面图
四、实验原理
采用收发一体式的超声换能器来完成信号的发射与回波信号的接收;用DSP处理器对超声传感器的发射和接收信号进行控制和高速采集,基于FFT变换来对数据进行分析和处理,并把处理数据传递到电脑,由电脑软件来显示测量的回波波形,完成物体的表面形貌成像或二维断面像、研究物体的运动状态以及对目标物体进行定位等实验。
实验装置主要由下列几部分组成:
1、实验水槽与测试架
水槽采用透明有机玻璃设计,成像物体放在水槽正面的载物台(图5-21)上,超声换能器头悬挂在导轨滑块(图5-5)上的吊杆(图5-10)旋转机构(图5-2)固定座(图5-11)上,该机构可以实现换能器的旋转,并带角度指示(图5-2),用于定位物体的角度方位;水槽后面的旋转梁(图5-7)用于悬挂目标物体(图5-8),可以改变物体在水槽中的位置,用于超声定位实验;水槽正上方测试架上的电机控制系统用于带动超声传感器对物体进行动态扫描,得到物体表面数据信息,成像出物体表面形状或断面像;水槽的右侧壁的台体上还有一个换能器固定座(图5-9),用于研究物体运动状态实验,具体实验时,换能器安装在此固定座上(图5-9),目标物体放在与吊杆(图5-10)相连的固定座(图5-11)上,由电机控制使之运动。
2、超声成像实验仪
实验仪器与超声传感器相连,超声传感器(换能器)采用收发一体式石英晶振结构,换能器的工作频率2.5MHz左右。
该实验仪器的实际工作原理是:
由DSP处理器控制高速D/A变换器产生2.5MHz的频率信号,信号经过放大处理后接到超声传感器上作为发射波;发射波碰见不同的物体组织后将产生回波信号,回波信号经过高速运放进行放大滤波处理后由高速A/D对接收到的信号进行采集,采用FFT变换作数据分析处理,并把数据传输到电脑上。
3、电脑分析界面
采集的数据信号被传送到电脑后,电脑可以显示回波波形;可以对物体进行扫描成像,得出物体的剖面像图;同时也可以测量物体的运动速度和对水中物体目标进行定位。
4、DH6001-MC直流电机控制器
提供成像扫描以及目标物体的运动速度控制。
图7换能器实际发射波形与接受
图8经过DSP数据处理后电脑显示的回波信号
五、实验内容
(一)观察水中物体的回波波形
图9回波波形图
1、换能器安装在测试架上并放在水槽(图5-22)中,载物台(图5-21)上放置表面不规则的有机玻璃样品;调整换能器头,使之对准水槽正面的载物台上的物体。
2、连接换能器与信号源前面板上的“传感器”插座,并把仪器后面板上的串口与电脑相连,开启电源。
注意:
通电工作时,一定确保换能器置水中。
3、打开电脑软件,用鼠标左键单击显控画面右下角的串口通信按钮,串口状态框上出现OK!
!
,然后变成END,说明计算机的串口已打开,可以与实验仪进行数据和命令通信。
4、用鼠标左键单击显控画面上工作方式框中的波形按钮,工作状态下面显示红色的波形显示,画面上将显示实时波形。
5、通过角度旋转座(图5-2)水平旋转换能器探头,改变换能器的入射角,观察回波波形。
(二)水中声速的测量
1、把超声换能器放置在水槽右侧面的固定座(图5-9)上,运动物块放在滑块吊杆旋转机构下的固定座(图5-11)上,换能器的方向与导轨(图5-3)方向一致,并对准小运动目标物体(见附录)。
(注意:
在通电时不要把换能器露出水面,最好关掉实验仪电源后再操作)
2、启动电源,打开串口,用鼠标左键单击显控画面上工作方式框中的波形按钮,工作状态下面显示红色的波形显示,画面上将显示实时波形以及发射脉冲波到接收回波之间的时间。
3、启动电机控制系统,使带着目标物体一起运动的滑块到S1的位置后停止,记下此时发射波到接收波之间的时间t1;再启动电机,改变目标滑块到位置S2,记下此时发射波到接收波之间的时间t2。
4、计算声速:
。
5、多次测量求平均值。
(三)对水中目标物体进行定位
1、拿出载物台(图5-21)上的有机玻璃样品,先转动测试架后面的悬挂梁(图5-7),使目标物体(图5-8)处在某个位置。
2、用鼠标左键单击显控画面上工作方式框中的定位按钮,工作状态下面显示红色的定位两字,工作方式框中的左边数据显示框显示经过的时间(单位:
秒),右边数据显示框显示传感器离目标的距离(单位:
厘米),画面上有成像图显示。
3、启动电机控制系统,使滑块(图5-5)移动到导轨(图5-3)中间位置。
4、切换到波形工作方式,通过传感器吊杆(图5-10)旋转机构(图5-2),缓慢旋转超声传感器,当传感器对准目标物体后,电脑界面上将显示最大的回波值,此时记下旋转机构(图5-2)上的物体方位角度θ值;然后再切换到定位工作方式,记下电脑上显示的目标物体距离换能器之间的距离Y(cm)。
(超声传感器正对着前方载物台时为0度,实验前要调节好)
5、转动旋转梁(图5-7),改变目标物体的位置,重新测量目标物体离超声换能器的距离和方位。
(四)测量水中物体的运动状态
1、把超声换能器放置在水槽右侧面的固定座(图5-9)上,运动物块放在滑块吊杆旋转机构下的固定座(图5-11)上,换能器的方向与导轨(图5-3)方向一致,并对准小运动目标物体(见附录)。
(注意:
在通电时不要把换能器露出水面,最好关掉实验仪电源后再操作)
2、用鼠标左键单击显控画面上工作方式框中的测速按钮,工作状态下面显示洋红色的测速两字,工作方式框中的左边数据显示框显示目标运动的速度(单位:
厘米/秒),同时画面上显示成像图,X轴代表时间t,Y轴代表物体离超声传感器的距离S。
运行速度较小时,速度的动态显示误差将会比较大,必须通过S-t曲线来分析物体的运动状态。
3、启动DH6001-MC直流电机控制器,让电机带动吊杆上的物体运动起来,就可以看见S-t曲线,左边的显示框显示目标物体的运动速度。
4、分析S-t曲线,可以通过△S/△t得到物体运动的平均速度。
具体方法是:
在S-t曲线上单击两个坐标点,对应的坐标点坐标以及两坐标点间的平均速度将在界面中显示出来。
5、通过直流电机控制器,改变物体的运动速度,再次测量观察物体的运动曲线并计算运动物体平均速度。
6、具体的实例如下图所示:
图10目标物体运动状态曲线
(五)扫描成像物体组织结构剖面图或表面形貌
1、操作步骤同
(一)观察成像物体的回波波形的步骤1~3。
2、连接直流电机控制系统,启动检查运行是否正常。
3、成像操作。
用鼠标左键单击显控画面上工作方式框中的成像采集按钮,工作状态下面显示洋红色的成像两字,画面上有成像图显示。
采集结束后,用鼠标左键单击显控画面上成像操作框中的成像处理按钮,显示处理后的成像画面。
根据显示效果,用鼠标左键点击增加门限或减小门限按钮,可对其进行后置处理,得到相对较好的成像图。
在采集的过程中,可以按信号放大和信号缩小来改变接收信号的强度。
4、启动直流电机控制系统,使换能器垂直扫描物体,观察实时成像图。
为使成像效果好,可以设置控制器,使扫描速度最慢,具体设置见直流电机控制器说明。
5、该成像不仅可以显示物体表面轮廓图(形貌),对于超声透射效果比较好的物体,还可以清晰的观察出二维剖面图。
图11实时扫描物体得到的回波成像图
图12经成像处理后的物体形状(形貌)
6、要使成像效果好,需要选择合适的扫描距离,也就是被成像物体离超声传感器的距离要合适,可以通过观察回波波形以及信号放大或信号缩小来确定距离;由于超声传感器的波束角不为零,距离太远会造成回波信号重叠,两个不同反射面的回波信号叠加在一起,降低了成像分辨率,波形重叠现象可以从图11中看出,所以成像物体尽可能离超声传感器近些;成像物体太近,则会产生多次反射,同一个反射面会出现一次、两次或多次回波。
超声定位附录
一、软件安装
1、USB驱动程序安装
(1)超声仪关闭,其上USB接口与电脑连线断开,从光盘上直接安装USB驱动程序。
(2)超声仪打开电源,其上USB接口与电脑连线,电脑屏上出现安装提示:
点击是,仅一次-------自动安装
未通过微软测试----------仍然继续
(3)安装完后,点击我的电脑---------属性-----硬件---------设备管理器----端口,USB
出现CH314A及对应端口(随电脑状态有所不同,如COM3),表安装成功。
2、安装软件DH6001
点击SETUP.exe,提示保留新文件,----Y,后面均是,忽略
二、通信串口选择
1、运行DH6001,查看其通信串口是否与电脑中COM3一样,若不一样,要点击串口选择,使其相同(从COM1至COM4)。
否则点击通信串口,不会显示OK,END,(表连通)。
2有时可通过改电脑中端号设置号,使二者相同
右击COM3,------属性-----端口设置----高级===端口号----将COM号改为一样
3、也可更改电脑上USB插口,使其一样。
三、注意事项
1.每次实验完后,小车要放在导轨中部,以便系统精确定位。
2.超声仪打开电源后,换能传感器必须在水中(工作),以防过热烧损。
四、物体波形观测与定位
(一)有机玻璃块
1.波形将传感器安置在小车下部,对准样品
(1)将有机玻璃块安放在槽中台上,传感器对准其右端,点击波形,可观测到两个回波信号,
一是前表面1的反射波(信号强),二是后表面2(紧贴槽壁)透射波的反射波信号(弱)
(2)将有机玻璃块拿掉,传感器对准槽壁,由于距离变远,则只能观测到1个回波信号。
(3)调节信号放大、减小,去掉杂波,使波峰尽量满屏,信噪比好。
(4)调小车转盘,使传感器垂直槽壁,(此时信号波峰最高)。
2、成像采集
(1)点击成像采集,在软件坐标上显示出反射波、透射波距传感器的位置。
(2)停止采集,(点击通信串口)用鼠标点击反射波、透射波位置,
在坐标一、坐标二分显示出反射波、透射波距传感器的位置、时间。
可算出玻璃厚度。
(再次点击通信串口,又开始釆集)
3.定位
清屏-----波形---------定位
在软件坐标上显示出反射波、透射波距传感器的位置,此时时间轴X变化,显示各回波时间,Y轴距离不变,此时Y轴数字表1面-----换能器距离,与坐标一中距离显示数字有一定误差,为正常。
(二)金属圆柱
1、方位确定
点击波形,转动小车上方位盘,当传感器正对淮金属圆柱时,波形信号最强,记下小车上方位盘的方位角θ,确定其方位。
此时没有透射回波,故只有一个波形。
2.位置确定
点击定位,在软件坐标上显示出金属圆柱(反射波)距传感器的距离,如Y=20.87cm,
当距离合适时,会出现较弱的二次回波。
点击1处,坐标一显示其距离为21.0cm,与Y=20.87cm有一定误差。
点击2处,坐标二显示其距离为41.6cm,为二次回波对应距离。
1、多次回波
(1)调小金属圆柱距传感器的距离,点击波形,软件屏上显示出多次回波信号。
(2)点击成像采集,过一会停止成像采集(点击串口通信),软件屏上显示出多次回波信号所对应距离。
五、测水中声速
1、水中声速
t=0,v=1402m/s
t=10,v=1447m/s
t=25,v=1497m/s
2、将传感器连接小车下端,面向左槽壁。
3、将小车沿导轨左行至x1=285cm,点击波形,软件屏上显示一个波形与
平均速度13.0回波时问t1=386us表第一次反射面回波时间
再将小车沿导轨左行至x2=79cm,点击波形,软件屏上显示波形及
回波时问t2=106us表第二次反射面回波间
V=2(x1=x2)/(t1-t2)
4、当小车与左槽壁距离很小时,可观测到多个回波信号。
六、小车运动状志的测定
1、将传感器安在水槽右下方,运动小物体(有机玻璃)安在小车下方。
2、点击波形,当传感器与小物体对淮时,波形信号最强。
小车右移,波形左移。
当二者距离很近时,会出现二次回波。
软件屏上显示回波时间。
3、点击采集成像,小车静止------均速向右-----小车静止------均速向左
软件屏上显示S-----t图,可能出现二次回波(信号弱)曲线。
4、在S-----t图直线上任点击两点,坐标一、坐标二显示两点的x、t,由斜率V=ΔX/Δt计算v
5、测试多段变匀速运动
6、采集成像后,可以点击存数据,另存为----文件名-----存于磁盘
要分析时,点击读数据,重现图形。
七、外貌成像
1、将大块有机玻璃放至后水槽,传感器安在小车下方。
2、点击波形,调二者垂直。
3、点击成像采集
4、打开车速开关,使小车缓馒从左向右扫描物体外貌并成像。
此时可用信号放大、缩小改变接收信号强度。
5、停止采集(点击串口通信),存数据。
6、清除显示,读出数据,点击成像处理,用轮廓成像一方式处理(专处理凸凹不平外形)
调整门限,消除二次波,可得较好成像图。
也可用其它方式(剖面)处理数据。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 精选 医学 实验 16 DH6001 超声 定位 综合 doc
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《阿凡达》观后感.docx
《阿凡达》观后感.docx
-
《大中专毕业生就业指导》课程教学大纲.docx
-
《建设工程合同》复习题及答案.docx
-
《蜡烛》上课教学方案设计12.docx
-
《奇妙的对联》教案解析.docx
-
《水浒传》30个主要情节概述.docx
-
《36岁儿童学习与发展指南》读书笔记.docx
-
《财务管理》习题及答案.docx
-
《多媒体技术》期末考试复习题及参考答案.docx
-
《现代推销技术》课程标准简版.docx
-
《园林绿化先进个人先进事迹材料》.docx
-
#《预防医学》题目答案汇总.docx
-
《爱的教育》读后感多篇.docx
-
《登泰山记》综合复习题及答案必修上册.docx
-
《江雪》教案.docx
-
《第4章一次函数》单元测试2含答案解析.docx
-
《铁路旅客运输规程》.docx
-
《小学语文生活化教学的研究》课题.docx
-
《证券投资基金基础知识》.docx
-
#3 汽机房设备及管道保温作业指导书.docx
-
《勃兰特下跪赎罪受到称赞》备课资料第一个向犹太人下跪赔罪的德国总理勃兰特维利访谈录.docx
-
《国际贸易术语解释通则》中文版.docx
-
《教育社会学》课程教案.docx
-
《老人与海》好词好句.docx
-
《钳工技能训练》实训教案.docx
-
1第一单元位置与方向导学案.docx
-
3篇关于校园电子竞技比赛活动策划书.docx
-
007质量部岗位说明书.docx
-
《工程现场施工安全事故应急救援预案》的管理章程办法.docx
-
《Web程序设计一课程设计》.docx
-
《打火匣》读后感.docx
-
《家政须知》.docx
-
人教新课标A版高中数学必修3第三章《概率》全章教学设计Word文档下载推荐.docx
-
人力资源人力资源规划表精编版Word格式.docx
-
施工总承包管理及配合措施文档格式.docx
-
日语N2真题及答案Word文件下载.docx
-
三年高考高考物理试题分项版解析专题18电学实验Word文档格式.docx
-
适应多品种小批量生产方式下的企业研究Word格式文档下载.docx
-
花的四字成语填空Word格式文档下载.docx
-
三毛经典语录上天给我的Word下载.docx
-
暑假爱心支教活动策划书文档格式.docx
-
科学技术与环境健康123Word文件下载.docx
-
华政刑法考研真题Word格式.docx
-
三年级语文上册单元教学反思Word文件下载.docx
-
三0二十年后Word文档下载推荐.docx
-
考研必备考研英语真题及解析Word格式文档下载.docx
-
高一英语 Unit5《The silver screen第四课时》精品教案 旧人教版第一册文档格式.docx
-
考研英语一真题及答案文档格式.docx
-
客房表格大全Word下载.docx
-
高一上学期期中考试英语试题 含答案Word文档下载推荐.docx
-
孔雀东南飞Word格式.docx
