 过程控制考试题库终结版要点.docx
过程控制考试题库终结版要点.docx
- 文档编号:12182057
- 上传时间:2023-04-17
- 格式:DOCX
- 页数:21
- 大小:182.83KB
过程控制考试题库终结版要点.docx
《过程控制考试题库终结版要点.docx》由会员分享,可在线阅读,更多相关《过程控制考试题库终结版要点.docx(21页珍藏版)》请在冰豆网上搜索。
过程控制考试题库终结版要点
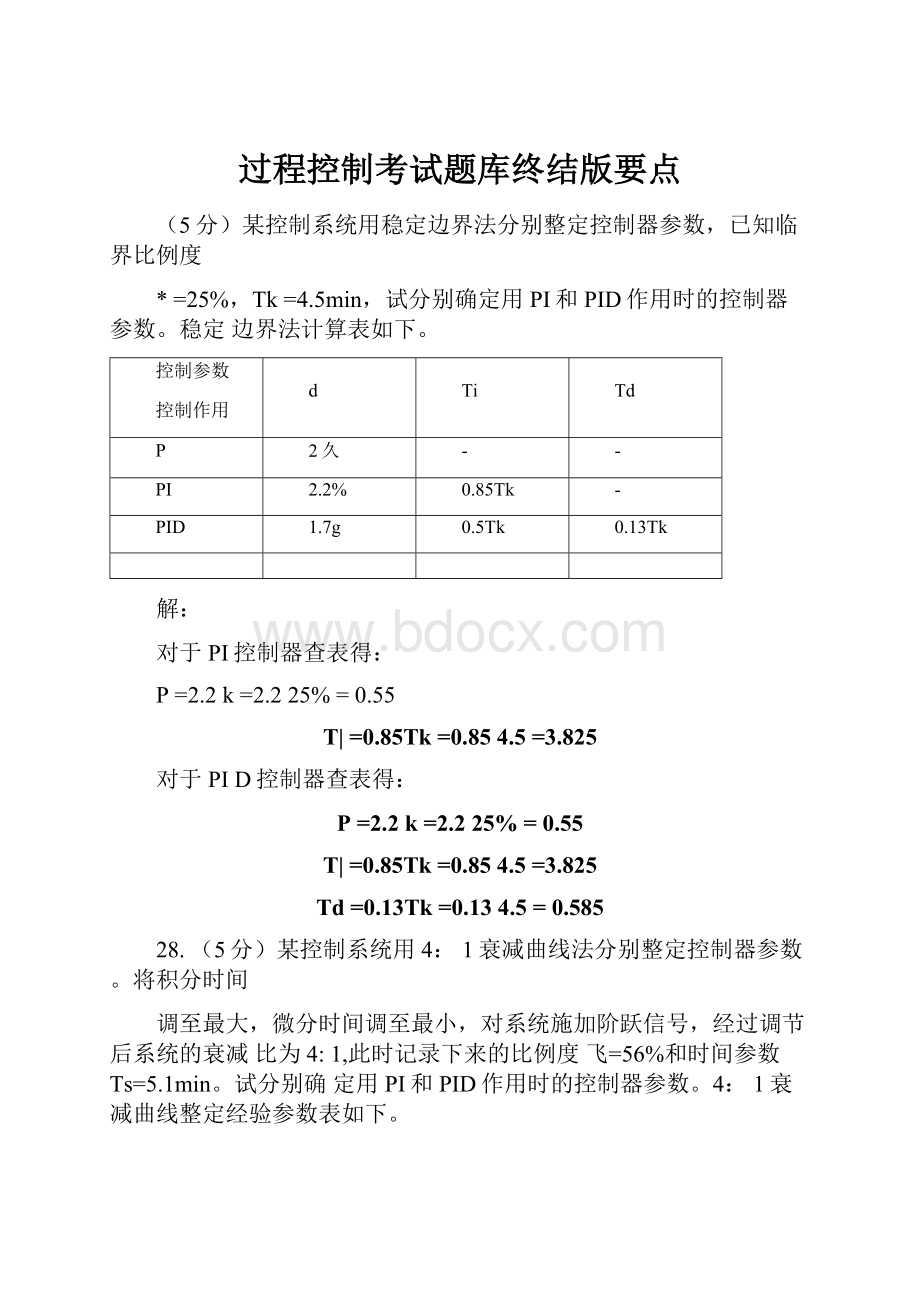
(5分)某控制系统用稳定边界法分别整定控制器参数,已知临界比例度
*=25%,Tk=4.5min,试分别确定用PI和PID作用时的控制器参数。
稳定边界法计算表如下。
控制参数
控制作用
d
Ti
Td
P
2久
-
-
PI
2.2%
0.85Tk
-
PID
1.7g
0.5Tk
0.13Tk
解:
对于PI控制器查表得:
P=2.2k=2.225%=0.55
T|=0.85Tk=0.854.5=3.825
对于PID控制器查表得:
P=2.2k=2.225%=0.55
T|=0.85Tk=0.854.5=3.825
Td=0.13Tk=0.134.5=0.585
28.(5分)某控制系统用4:
1衰减曲线法分别整定控制器参数。
将积分时间
调至最大,微分时间调至最小,对系统施加阶跃信号,经过调节后系统的衰减比为4:
1,此时记录下来的比例度飞=56%和时间参数Ts=5.1min。
试分别确定用PI和PID作用时的控制器参数。
4:
1衰减曲线整定经验参数表如下。
〜、、、控制参数控制作用'
d
Ti
Td
p
6s
-
-
pi
1.2Q
0.5Ts
-
pid
0.86s
0.3Ts
0.1Ts
解:
对于PI控制器查表得:
P=1.2、s=1.256%=0.67
Ti=0.5Tk=0.55.1=2.55
对于PID控制器查表得:
P=0.8、:
s=0.856%=0.48
TI-0.3Tk-0.35.1=1.53
Td=0.1Ts=0.15.1=0.51
29.(10分)一个流量双闭环比值控制系统如题5.2图所示。
其比值用DDZ-川
型乘法器实现。
已知Q1max=26500m3/h,Qzmax=32000m3/h。
求:
a)画出控制系统的结构图。
b)当I0=16mA时,比值控制系统的比值K及比值系数K'分别为多少。
c)待比值系统稳定时,测得h=16mA,试计算此时的12为多大。
—III
ID
为T
题5.2图流量双闭环比值控制系统原理图
解:
1)
由于Io=K164
得K=lo-4/16=(16-4)/16=0.75②所以
K+—①
Q2max
2)
由仪表的比例系数定义,
K*i75加9②
K」2-4mA
h「4mA
得:
12二K'(h-4mA)4mA②
即:
12=0.9(10-4)4=9.4mA②
30.一个比值流量控制系统用DDZ-川型乘法器来进行比值运算,其原理图如题3图所示。
流量用孔板配差压变送器来测量,但没有开方器,已知Qjmax=3600kg/h,Qzmax=2000kg/h。
a)试画出比值控制系统的结构图。
b)如果要求比值为Q1:
Q^2:
1,应如何设置乘法器的设定值I。
。
(乘法器的输出|'=(11一4)(1°一4)4)
16
题3图单闭环乘法比值控制系统原理图
解:
流量的最大量程分别为F1max=3600kg/h,F2ma^2000kg/h。
流量与检测电流
的关系为,1广16F^4,12=16F^4,流量比值为K二旦,乘法器的输
F1maxF2maxR
出为|、(|1一4)仏-4)*。
16
稳态时有1'“2,即:
l^(l^4)(l^4)4,1^164,
16(11-4)
l0=16K'4。
不加开方器情况,要进行非线性处理:
F1max
F2maxj
Fimax
F2max
口3600(
22000
=0.92
=0.81
乘法器的设置值:
l0=K非线性164=0.81164=16.96mA
①②③④⑤
六、应用题(15)
1.为了获得被控对象的动态特性,常用的实验方法之一是给被控对象施加一个阶跃扰动信号,观察其响应,从而有观察到的信息分析其特性。
但由于某些生产过程的被控对象不允许长时间施加这样的干扰信号,所以人们采用矩形脉冲信号取代阶跃扰动,获得观测数据,再将脉冲响应曲线转换成阶跃响应曲线,以便于特性提取。
题图6为一个矩形扰动脉冲X(宽度为t0,高度为A)施加到被控对象上的响应曲线y。
用所学过的控制理论知识,将该脉冲响应曲线转换成高度为A的阶跃信号响应曲线。
要求分析转换机理,写出转换步骤。
题6图矩形脉冲输入/输出曲线
阶跃响应曲线⑤
答:
设被控对象特性为线性特性,由叠加原理,输入一个矩形脉冲信号,相当于施加两个阶跃信号,一个在t=0处,另一个在t=t0处。
⑤设阶跃响应为y1,将所测绘的响应曲线按时间间隔t0等分。
在第一区间,y«t0)=y1(t0)。
在第二区间y1(2t0)=y(2t0)+y〔(t0)。
第三区间,y1(3t°)=y(3t°)+y1(2t°)。
以此类推,将前一区间的阶跃响应曲线叠加到本区间的脉冲响应曲线上,即可得到本区间的阶跃响应曲线。
⑤其响应曲线见下图。
2.为了获得被控对象的动态特性,常用的实验方法之一是给被控对象施加一个阶跃扰动信号,观察其响应,从而有观察到的信息分析其特性。
但由于某些生产过程的被控对象不允许长时间施加这样的干扰信号,所以人们采用矩形脉冲信
号取代阶跃扰动,获得观测数据,再将脉冲响应曲线转换成阶跃响应曲线,以便于特性提取。
题图6为一个矩形扰动脉冲X(宽度为to,高度为A)施加到被控对象上的响应曲线y。
用所学过的控制理论知识,将该脉冲响应曲线转换成高度为A的阶跃信号响应曲线。
要求分析转换机理,写出转换步骤。
ol1—!
肚冲扰动愉入
3.在某一蒸汽加热器的控制系统中,用响应曲线法进行参数调整。
当电动单元组合控制器的输出从6mA改变到7mA时,温度记录仪的指针从85C升到
87.8C,从原来的稳定状态达到新的稳定状态。
仪表的刻度为50/00C,并测
出纯滞后时间o=1.2min,时间常数To=2.5min。
如采用PI和PID控制规律,试确定出整定参数(响应曲线法控制器参数整定经验公式见附表)。
解:
输入增量为:
厶X=7-6=1mA
输出增量为:
△丫=87.8-85.0=2.8C
输入量程差为:
Xmax-Xmin=10-0=10mA输出量程差为:
Ymax-Ymin=100-50=50°C
所以,
■■Y/(Yma
IX
-丫min)
2.8/50
X/(X
max
一Xmin)
1/10
二0.56
由查表得:
在选用PI控制器时,
.K0e00.56汉1.2
-=1.1100%=1.1100%=30%
T。
2.5
TI=3.30=3.31.2=3.96min
在选择PID控制器时,
—0.85100%=0.850.561.2100%=23%
T02.5
Ti=2o=21.2=2.4min
Td=0.5.0=0.51.2=0.6min
响应曲歩法控制器瞎散整定经验公式
控制动件■一—一
6
『1
TD
P
x100%
—
PI
iJX冷HX100強
3r3TD
—
P[D
—
0.85N100^
Q-5rfl
4.用分度号为K的镍铬-镍硅热电偶测量温度,在没有采取冷端温度补偿的情况下,显示仪表指示值为500C,而这时冷端温度为60C。
试问:
实际温度应为多少?
答:
如果热端温度不变,设法使冷端温度保持在20r,此时显示仪表的指示值应
为多少?
棣钻-稼班趣巾肝分度表(行厘号;K.奏比瑞温厘为
0
10
20
'30
40
50
60
70
£0
90
fe/mV
*0
0.000
0.3^7
0.798
1.203
1.61L
2,022
2.436
2.850
3.266
3,681
100
4.095
4.50&
4.919
5.713
9.745
6J37
6.53^
氐删
7.338
7.737
200
8.137
8^37
A.03B
9.341
10J51
10,5W
10.969
11.391
11.795
300
12-20?
J2-623
B.039
J3.456
13.874
U„292
14-7T2
ISA31
15.552
15.974
400
16.395
16.818
17.241
17.664
I8.O8S
18.513
18-938
19.363
19.788
20.214
500
20-&40
21曲
21,493
21.919
32.346
g-1yyi
23.19$
站.血
24.050
24.476
600
24.902
25.327
25.751
26.176
26.399
17.022
27.445
27.86?
28.28&
:
S.=19
700
29J2B
29.547
29,965
30.353
30.7^9
31-214
31上29
32.042
32.455
32.S66
800
32.277
3J.686
54.095
弭.502
14.909
IS.314
35.71E
36.121
36,534
36,925
900
37.323
37.724
38.122
38,519
38.915
39.310
39-703
40.0^6
+Q.4B8
4D.S97
1000
41..25®
41.657
斗
42.432
42.817
43.202
43.5S5
43.96S
-14.34^
44.72F
1100
45.10®
43.486
43.863
46.238
445.612
46.9S5
47.356
47.726
48-095
4S.462
12DQ
胡.&茹
49.132
«.556
45.91$
50.276
50.633
50.990
51.544
51-697
52-D49
1300
52.398
52.747
53.093
53.439
53.7S1
54.125
84.466
54.807
***************************
解:
显示仪表指示值为500时,查表可得此时显示仪表的实际输入电势为20.64mV,由
于这个电势是由热电偶产生的,即
E(t,to)=20.64mV
同样,查表可得:
E(t,0)=E(t,t°)+E(t°,0)
-20.642.463=23.076mV
由23.076mV查表可得:
t=557°C。
即实际温度为557C。
当热端为557C,冷端为20C时,由于E(20,0)=0.798mV,故有:
E(t,t°)=E(t,O)-E(t0,O)
=23.076-0.798=22.278mV
由此电势,查表可得显示仪表指示值应为538.4Co
5.(12)某生产过程需要甲乙两种液体,甲液体的正常流量为1250m3/h,仪表量
程为0-1350m3/h;乙的正常流量为150m3/h,仪表量程为0-240m3/h。
如果选甲为主变量,乙为副变量,设计一个控制乙的单闭环比值控制系统,画出流程图并计算引入开方运算与不引入开方运算所分别设置的比值系数。
答:
采用乘法器的单闭环比值控制流程框图如图所示
(其中Qi为甲流量,Q2为乙流量)Q1fmax1350m3/h:
Qi的量程上限,Q2max=150m3/h:
Q2的量程上限,Qimin=0m3/h:
Q1的量程下限,Q2min=0m/h:
Q2的量程下限。
1引入开方器时,比值系数为:
Q2Q1max_Q1min
Kif2fimaxfiminQ1max_Q1min
K
Q1Q2max—Q2minQ2max_Q2min
1501350-0
0.6751250240-0
2不引入开方器时:
Q2Q1max_Q1min
K
IQ1Q2max—Q2minJ
(1501350-0[
1250240-0
2
二0.675=0.456
6.设计一个比例、积分(PI)调节器,控制一个温度调节系统。
控制器的调节范围为:
0-3000E,控制器的输出为4-20mA。
当给定被控对象一个如图(a)所示的阶跃输入时,测定的被控对象响应曲线如图(b)所示(响应曲线法控制器参数整定经验
公式见下表)。
要求:
计算出控制器的控制参数,画出控制系统方框图
响应曲线法控制器参数整定经验公式表
调节规律
调节参数
比例度%
积分时间Ti
微分时间Td
P
(K0t/T0)X100%
PI
1.1(K0t/T0)X100%
3.3t
0.5o
PIDO.85(Kot/To)X100%2t
答:
由已知条件得:
控制器的调节范围上下限为:
ymax=3000C和ymin=0°C,控
制器的输入上下限为Pmax=20mA和Pmin=4mA,
由测试数据得,当输入信号从4mA变化到18mA时,被控对象输出信号从0C变化到2500Co
由此得广义被控对象的放大系数K0,
/
ymaxymin」
/
Rax—Pmin丿
Ko
(2500-0]/『18-4]
13000-0丿/120-4丿
2500理0.95
300014
在测得的曲线上找拐点A,作切线交于BC点,如下图。
图中的读数约为:
tB3min,tc20min。
所以,To=20-3=17min,o二3min。
由表中查得PI控制器的比例度计算公式为
K0£00.95汇3
、=1.1100%=1.1100%=18.48%
To17
Kc"、=1/0.1848=19.11
积分常数为:
T|=3.3"=3.3X3=9.9min
控制系统方框图见下图
Pl控制器
厂义被控对家
广义被控对象
PI控制器
7.已知已被控对象的传递函数为
W°(s)二
K°eY
(TiS1)(T2S1)
在阶跃扰动r(t)变化(从r(t)=12mA变化到r(t)=16mA)的作用下,其响应曲线如下图所示。
使用阶跃响应曲线确定被控对象的传递函数中的各参数,K。
,.,
T1和T2。
二阶被控对象响应曲线上各特征值关系曲线图见附图。
答:
曲线的起始点为B,在曲线中找到拐点P,过拐点作切线交于C、D<
1)在阶跃响应特性曲线上确定出
y(:
:
)=108.5,y(0)=100,y广101,y^107,T=11,0=5
2)Wei
3)Wei
Ji
0.&
06
0.04
001
0.06
0.03
0.10
f7
1
!
><
/
、
Z
0.65O.3CI0.75
8.对于有自衡能力的二阶被控对象的传递函数为:
W°(s)=
K。
(Tis1)(T2S1)
Ko,
其单位阶跃响应曲线如下图。
用图解法确定此二阶被控对象传递函数的参数
Ti和T2。
其中BE与m的相互关系表见附表。
答:
由于输入为单位阶跃输入,被控对象的放大系数为K。
=13.5
Ti和T2的确定步骤如下:
1)过响应曲线的拐点A作切线;
2)分别交B、C、D和E点,并求得CD和BE值;
B=5.5,C=5,D=9.5,E=4.5
CD=9.5-5=4.5,BE=5.5-4.51
3)从附表中求得与BE值对应的m值。
4)由CD二T2-T1,m二T1/T2解得
5)
9.对于一个热交换系统设计一套前馈-反馈复合控制装置,系统的管道仪表流程
K图如图所示。
已知被控对象和执行装置的传递函数近似为Wa(s)亠e—aS
TaS+1(其中,Ka=3,Ta=5min,5=2.5min),反馈通道检测变送装置的传递函数为Wm(s)Km(其中Km=0.5),扰动通道的传递函数近似为
KWd(s)-^e—dS(其中,Kd=0-5,Td=3min,=3min)前馈通道检测
TdS+1
变送装置的传递函数为Wq(s)=Kq(其中Kq=0.5)。
试在反馈通道上设计一个PID控制器Wc(s),在前馈通道上设计一个前馈控制器Wf(s)。
要求:
设计控制器,计算出各控制器的控制参数,并画出可实施的控制系统方框图。
注:
响应曲线法控制器参数整定经验公式见下表
调节规律
调节参数
比例度%
积分时间Ti
微分时间Td
P
(K°%/T。
)X100%
PI
1.1(K°L/T0)X100%
3.3%
PID
0.85(KJ0/T0)X100%
2^0
0.5®
解:
反馈通道主控制器的设计
用响应曲线法设计反馈通道的PID主控制器,系统被控对象的广义传递函数可近似为
KaKm
Ka--asKaKm..asK0--0s
W0(s)=Wa(s)Wm(s)eKmee
Tas+1Tas+1T0s+1
其中K0=KaKm=30.5=1.5,T0=Ta二5min,0=a=2.5min
由查表可得:
、%=O.85K00/T0100%=0.851.52.5/5100%=63.75%
Kc-1/、%=1/0.675=1.57
T|=20=225=5
TD=0.52.5=1.25
PID控制器Wc(s)的方框图为:
1.57|1十丄+1.255
前馈通道的前馈控制器设计
由不变性条件
Wf(s)Wa(s)WQ(s)Wd(s)=0
得:
Wf(s)—Wd(s)Wa(s)WQ(s)二
KdTaS*1e_(羊卫)s0.55^1e_(3-2.5)s
■ee
KaKQTds130.53s133s1
Wf(s)是一个具有超前性质和纯滞后的前馈补偿器。
Kf=15^J的物理实现方框图见下图,其中:
Kf=0.33,T,=5,T2=3,
T2S133s1
计算k=卫-1-1=0.67
T233
e°5s的物理实现
就本系统来讲,f=0.5,远比T1,T2小,所以e°5s可近似为一个惯性环节,即:
e°5s
0.5s+1
所以,前馈控制器Wf(s)的物理实现图见下图
14


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 过程 控制 考试 题库 终结 要点
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
美国的教育文化.docx
-
美容院店长顾问整体规划.docx
-
拿来主义篇九.docx
-
论文.docx
-
萝北县投资项目可行性研究报告.docx
-
埋石混凝土施工方案.docx
-
毛泽东思想和中国特色社会主义理论体系教学大纲修订.docx
-
绿化养护技术交底.docx
-
马克思主义论文马克思主义中国化的历史进程与经验启示.docx
-
门诊应急预案.docx
-
面试技巧讲座新闻稿.docx
-
名人名家悼挽联 第14页挽联.docx
-
煤矿安全演讲稿.docx
-
某高线工程电气控制系统描述详细.docx
-
美德少年演讲稿集锦7篇.docx
-
美容院答谢会主持词怎么写.docx
-
幕墙全套检验批资料.docx
-
南华大学C语言实验报告.docx
-
描写秦兵马俑的导游词.docx
