 采用nRF24L01和MSP430单片机的射频传输模块设计.doc
采用nRF24L01和MSP430单片机的射频传输模块设计.doc
- 文档编号:11525015
- 上传时间:2023-03-12
- 格式:DOC
- 页数:4
- 大小:858.51KB
采用nRF24L01和MSP430单片机的射频传输模块设计.doc
《采用nRF24L01和MSP430单片机的射频传输模块设计.doc》由会员分享,可在线阅读,更多相关《采用nRF24L01和MSP430单片机的射频传输模块设计.doc(4页珍藏版)》请在冰豆网上搜索。
采用nRF24L01和MSP430单片机的射频
传输模块设计
DesignofTransmissionModuleBasedonnRF24L01andMSP430
葛志军郝永生军械工程学院(河北石家庄050003)
姜勉
西安军代局驻805厂军代室(陕西西安710028)
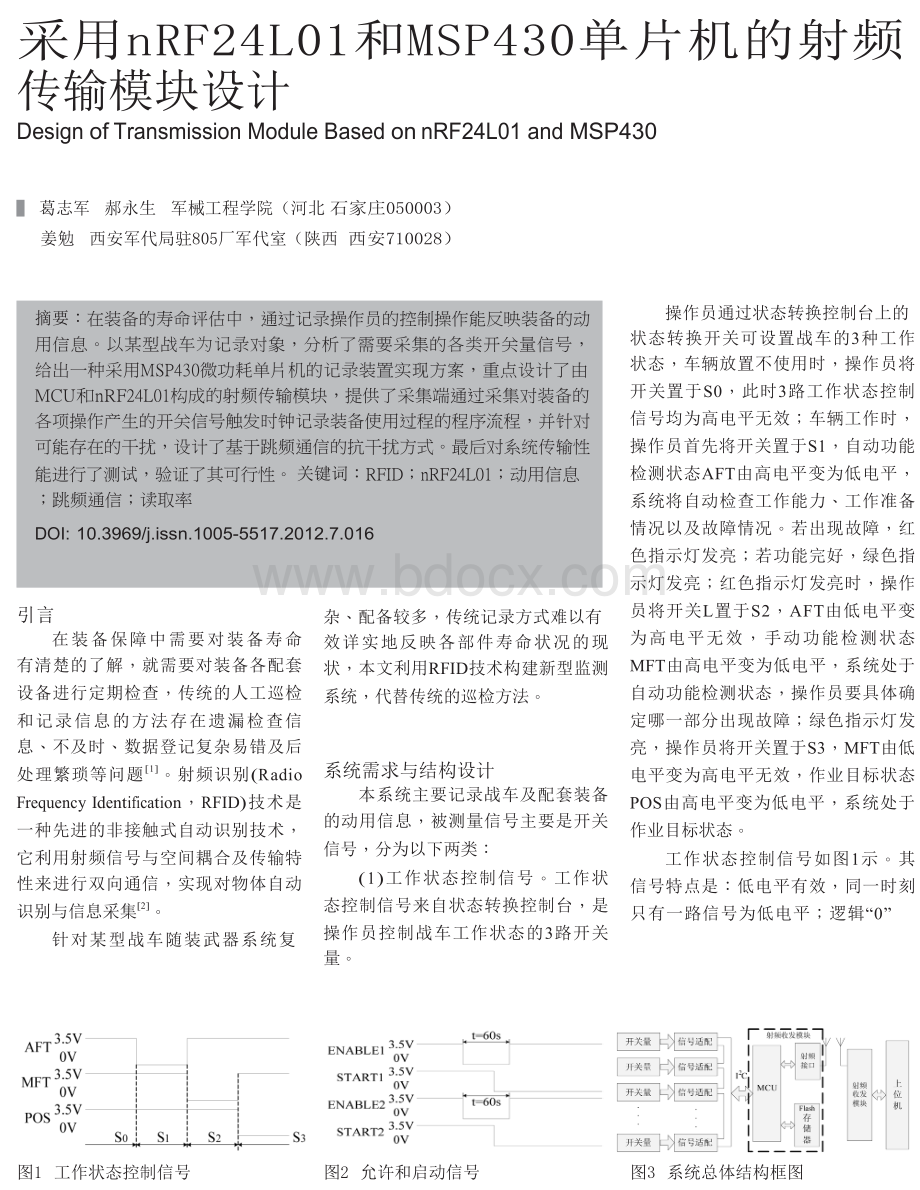
操作员通过状态转换控制台上的
状态转换开关可设置战车的3种工作状态,车辆放置不使用时,操作员将开关置于S0,此时3路工作状态控制信号均为高电平无效;车辆工作时,操作员首先将开关置于S1,自动功能检测状态AFT由高电平变为低电平,系统将自动检查工作能力、工作准备情况以及故障情况。
若出现故障,红色指示灯发亮;若功能完好,绿色指示灯发亮;红色指示灯发亮时,操作员将开关L置于S2,AFT由低电平变为高电平无效,手动功能检测状态MFT由高电平变为低电平,系统处于自动功能检测状态,操作员要具体确定哪一部分出现故障;绿色指示灯发亮,操作员将开关置于S3,MFT由低电平变为高电平无效,作业目标状态POS由高电平变为低电平,系统处于作业目标状态。
工作状态控制信号如图1示。
其信号特点是:
低电平有效,同一时刻只有一路信号为低电平;逻辑“0”
引言
在装备保障中需要对装备寿命有清楚的了解,就需要对装备各配套设备进行定期检查,传统的人工巡检和记录信息的方法存在遗漏检查信息、不及时、数据登记复杂易错及后处理繁琐等问题[1]。
射频识别(RadioFrequencyIdentification,RFID)技术是一种先进的非接触式自动识别技术,它利用射频信号与空间耦合及传输特性来进行双向通信,实现对物体自动识别与信息采集[2]。
针对某型战车随装武器系统复
杂、配备较多,传统记录方式难以有
效详实地反映各部件寿命状况的现状,本文利用RFID技术构建新型监测系统,代替传统的巡检方法。
系统需求与结构设计
本系统主要记录战车及配套装备的动用信息,被测量信号主要是开关信号,分为以下两类:
(1)工作状态控制信号。
工作状态控制信号来自状态转换控制台,是操作员控制战车工作状态的3路开关量。
图1工作状态控制信号
图2允许和启动信号
图3系统总体结构框图
摘要:
在装备的寿命评估中,通过记录操作员的控制操作能反映装备的动用信息。
以某型战车为记录对象,分析了需要采集的各类开关量信号,给出一种采用MSP430微功耗单片机的记录装置实现方案,重点设计了由MCU和nRF24L01构成的射频传输模块,提供了采集端通过采集对装备的各项操作产生的开关信号触发时钟记录装备使用过程的程序流程,并针对可能存在的干扰,设计了基于跳频通信的抗干扰方式。
最后对系统传输性能进行了测试,验证了其可行性。
关键词:
RFID;nRF24L01;动用信息;跳频通信;读取率
DOI:
10.3969/j.issn.1005-5517.2012.7.016
为0V,逻辑“1”为3.5V。
(2)允许启动信号。
允许启动信号来自控制台接口组合,记录为装备的打靶等信息。
当控制台接口组合面板上的指示灯1发亮时,说明雷达已经锁定目标,此时从控制台接口组合传来的允许信号ENABLE1由高电平变为低电平,黑匣子定时器开始定时,实时检测启动信号START1是否在60s内由高电平变为低电平,若检测到低电平,说明操作员按下“启动1”按钮的时刻是正确的,否则为误操作。
操作员必须在60s内,操作“启动”按钮,产生启动START1信号,进行
首先由采集电路采集各路开关量
信号,触发微处理器时钟记录时间信息,由发射电路编码后发送,接收电路接收信号并将解码后的信息传送给上位机,MCU通过I2C总线[3]完成对采集过程的控制。
EnhancedShortBurst协议,可以实现
点对点或是1对6的无线通信,无线通信速度可以达到2Mbps[5]。
此次设计主要用到了MSP430F5438两个串口通信模块USART0和USART1,USART0作为UART使用,提供异步通信,通过MAX3232电平转换芯片提供RS-232接口和PC机进行通信[6],USART1作为SPI使用,提供同步通信,主要是和nRF24L01之间进行命令和数据通信。
SPI(SerialPeripheralInterface)总线是由Motorola公司提出的一种同步串行外设接口只需片选CS,串行时钟SCK,串行输入SI,串行输出SO等四
硬件设计
本设计中,数据采集端与接收端采用相同的单片机作为MCU控制单元,这样减少了电路设计的开发量,并取得很好的兼容性。
MSP430单片机与nRF24L01的连接方式
MCU选用TI公司新一代
图4单片机与nRF24L01连接图
导弹加电和发射,否则操作无效,雷达开始搜索下一目标。
允许信号ENABLE2和启动信号START2,用于控制雷达搜索另一目标,其功能原理与ENABLE1、START1相同。
允许和启动信号如图2示,其特点如下:
①ALW1和STT1为一组,ALW2
和SU2为一组,两组之间相互独立;
②信号幅值:
逻辑“0”为0V,
逻辑“1”为3.5V;
③四路信号均为低电平有效。
根据要求,设计系统结构如图3
所示。
图5nRF24L01模块电路图
基于闪存的超低功耗微处理器MSP430F5438,内含256KB+512B的FLASH和16KB的随机存取数据存储器RAM,可以将驱动及控制nRF24L01的程序写入该闪存,无需外接EPROM,简化了电路设计降低了系统功耗。
并有达到4个通用通信接口,支持SPI、I2C通信[4]。
射频模块选用一款工作在
2.4~2.5GHz通用ISM频段的单片无线收发器芯片nRF24L01,nRF24L01由片内硬件自动完成曼彻斯特编码
/解码,内部集成NORDIC自己的
图6主程序流程
条线就可以完成控制器与各种外围器件的通讯[7]。
nRF24L01与MCU连接时采用单
片机标准的SPI接口,把MSP430F5438的管脚P1.4、P3.0、P1.3、P3.3、P3.2、P3.1配置成通用I/O引脚,分别与nRF24L01的IRQ,CE,CSN,SCK,MOSI,MISO连接,控制nRF24L01的工作方式,连接电路如图
4所示。
nRF24L01模块电路
nRF24L01芯片的VCC脚接电压范围为1.9V~3.6V之间,而MSP430单
6所示。
按照程序模块化设计的思路,设计相应子程序iic_start()、iic_stop()、slave_ACK()、slave_NOACK()、check_ACK()等,分别实现对I2C的启动、中止控制和应答位的发送、中止和检查等功能,进而实现对数据传输过程的控制。
基于跳频通信的抗干扰设计
对于NRF24L01的编程主要是通过命令控制线CE、CSN以及中断信号IRQ共同完成的。
发射节点在配置完成以后,CE置高,发射节点FIFO中的数据发出;接收节点成功接收到数据,IRQ置低;接收节点自动发射ACK,发射节点收到ACK后IRQ置低,表示发送成功。
2.4GHz属于开放的ISM频段,许多系统如WLAN、蓝牙等都共用这一频段,通信可能会受到外界环境较多的干扰[8],为此,本系统设计了自适应跳频通信方式来降低外界干扰带来的影响。
本设计中,拟选用6个频道进行通信,这六个从2.4GHz到
2.45GHz,相邻2个信道间隔10MHz,当某个数据频道出现干扰时,将跳到另一个频道中进行通信。
为了实现跳频,设计一个与数据频道相关的数据结构,其中设置变量ch_Index表示从站当前使用的数据频道在数据频道数组中的索引,该变量初始化为0(2.4GHz)。
数据采集端发送和接收端接收程序流程如图7所示。
如果顺利完成通信,采集端的MCU和发射模块进入休眠状态,一直到下一个采集周期的到来。
如果没有发送成功并且没有达到最大重发次
a)nRF24L01发送流程
图7发送和接收程序流程图
b)nRF24L01接收流程
a)无跳频的射频模块
图8干扰下实际通信波形图
b)有跳频算法的射频模块
片机的I/O输出为3.3V,因此I/O口
线直接连接即可。
VSS配置接地,在XC1、XC2间配置16MHz的外部晶振。
射频收发的天线部分使用PCB板天线,用一个4.7μF钽电容并联一个小电容进行去耦。
nRF24L01模块电路如图5所示。
采集,主要记录装备使用的时间区
间;为了降低干扰对射频传输的影响,设计了基于跳频通信的抗干扰程序。
采集端程序设计
数据采集前端通过传感器检测采集对装备的各项操作产生的开关信号,信号特点是低电平有效,时钟开始计时,检测到高电平信号停止计时,记录时间区间;检测到击发类型信号时记录时间节点。
记录完成将结果发送至MCU处理。
主程序流程如图
软件设计
系统主要由2个方面的程序控制,包括采集端程序和发送接收程序。
由于系统是针对装备使用信息的
数,采集终端将重发该帧数据;如果
连续重发达到三次上限,修改数据频道索引ch_Index,这样将在另一个频道进行数据通信,完成一次数据频道跳频。
ch_Index值的改变按照
0-2-4-1-3-5-0的规律进行,这样跳频后与跳频前的信道频率间隔至少为
20MHz,即跳频后的通信频道与受干扰频道拉开了20MHz的频率间距,并且如果该频距仍然无法完全消除干扰的影响,节点会自动又进行一次跳频,进一步拉开与干扰频道的频距。
由于干扰通常在一定时间内只在某个频道存在,6个数据频道同时受到干扰的概率较小。
因此,该方法可以有效地抵制干扰。
实验分析
为了检验设备传输特性,在实验室加入2.4GHz的噪声信号,分别在不做跳频和有跳频算法的情况下,进行收发验证。
用示波器记录发送波形如图8所示。
图8a中黄色信号是发射端CE,绿色信号是发射端IRQ,接收端没有信号回馈,由于达到最大发射次数,CE置高后将近10msIRQ才置低。
证明发送失败。
图8b中紫色信号是发射端CE,绿色信号是接收端IRQ,黄色信号是发射端IRQ,可以看出发射端使能CE后,发送端从发出数据到接收ACK之间的时间间隔只有3ms,可以判断出通信成功,验证了跳频方式能够有效抵制干扰。
结语
本文设计了一个车辆装备动用信息检测系统,给出了系统构成和实现方案。
设计了采集端单片机控制的采集装备动用信息的程序和基于跳频通信的通信程序,用来抵制干扰,以顺利完成通信。
最后经过实验验证跳频方式能有效抵制干扰,结果显示符合
装备应用实际,具有应用价值。
参考文献:
[1]安治永,李应红.射频识别系统的关键技术及在物流管理中的应用[J].航空维修与工程.2005,3:
50-52
[2]冯海文,付博文.一种基于RFID的安全巡检模型[J].沈阳工业大学学报.2009,31(4):
462-465
[3]何立民.I2C总线应用系统设计[M].北京:
北京航空航天大学出版社,2002
[4]TexasInstrument.MSP430F5xxFamilyUser's
Guide[Z].2009
[5]迅通科技.单片2.4G无线射频收发芯片nRF24L01使用指南[Z].2009
[6]曹世华.主动式RFID阅读器与车辆识别系统的设计与实现[D].北京邮电大学,2007
[7]曹傧,王祥,程野.SPI控制器的ASIC设计与实现[J].数字通信
2010,2:
94-96
[8]杨剑.基于nRF905的无线射频数据采集系统的开发与实现[D].中南大学,2007
输出语句;
081545.00:
24小时制UTC时间,格式为hh/mm/ss/.ss;
4544.7518:
当前纬度值,度分格式;
N:
纬度方向,N(北纬)或S(南纬);
12317.5230:
当前经度值,度分格式;
E:
经度方向,E(东经)或W(西经);
140.0:
接收机天线所处位置海拔高度;
M:
代表单位米。
分析可以看出,导航电文以“$”符开始,回车符结束,各种信息间以逗号“,”分开,根据这个规律,可以编写解码程序将各种导航信
息分类存储,软件流程如图8所示。
飞行抛物的控制
抛物控制的软件流程如图9所示。
系统首先装载目标位置坐标信息,然后采集传感器信息并进行运算处理,当距目标距离d小于等于提前抛掷距离阈值D时,开始抛物。
抛物结束后,延时5秒钟,当飞行器飞出投掷目标范围后舵机挡板自动闭合收起。
得。
上接56
结语
本文分析了飞行抛物算法公式,制定了各参量的求解方法,并且针对MEMS陀螺仪测角误差随时间积累的不足,利用GPS传感器进行了俯仰角的校正,设计了飞行器抛物的控制流程。
最后经过多次调试实验,结果表明,对于一些密度较大,受风力影响较小的物体可以实现准确定点抛物。
如何减小或补偿风力的影响是下一步
实验与调试
为了减小高大建筑物对信号的遮蔽和反射,实验选在郊外开阔的广场,在近似无风的天气下进行测试。
抛投物体分别选择重量为200g的布袋、水袋和沙袋以尽可能全面地模拟实际情况。
实验结果如表1所示,表中数据是重复实验十次后取平均值所
研究的方向。
参考文献:
[1]朱延波等.一种新型空投用缓冲装置的设计[J].机械设计
2011,28(6):
67-68
[2]孙爱军.空抛物资搜寻指挥系统的解决方案[J].无线电通信技术
2003,29
(2):
6-7
[3]李文新等.基于ARM9与WindowsCE的车辆GPS定位信息采集系统[J].电子设计工程,2010,18(6):
80-81
[4]翁海诠等.基于最小分辨率的MEMS陀螺漂移抑制方法研究[J].仪器仪表学报,2011,32(10):
2372-2373
[5]AnalogDevices,Inc.ADuC7026Datasheet[Z].2006


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 采用 nRF24L01 MSP430 单片机 射频 传输 模块 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 江南大学现代远程教育 考试大作业1.docx
江南大学现代远程教育 考试大作业1.docx
-
江南大学《信息安全概论》大作业答案.docx
-
江南大学现代远程教育考试大作业.docx
-
江南大学现代远程教育2020年上半年课程考试大作业.docx
-
2020年江南大学信息安全概论大作业答案.docx
-
江南大学现代远程教育2020年上半年课程考试大作业..docx
-
江南大学现代远程教育 考试大作业.docx
-
兽医师执业活动年度报告登记表.docx
 美术开学第一课-二年级.pptx
美术开学第一课-二年级.pptx
-
中小学教师中高级职称答辩备考试题及答案.docx
-
安卓课程设计-手机通讯录系统.doc
-
名师选拔笔试试题.docx
-
2021年全国普通高等学校运动训练、民族传统体育专业单独统.docx
-
成人失禁相关性皮炎护理实践专家共识解读.pptx
-
人音版音乐六年级下册全册表格式教学设计.docx
-
教师职称学科带头人笔试面试参考题.docx
-
骨干教师选拔笔试试题初稿.docx
-
行政法学判断题.docx
-
动物诊疗机构年度报告登记表.docx
-
好学生好学法读后感.docx
-
房屋买卖合同(详细范本).docx
-
高中寒假开学第一课.pptx
-
XX工程项目管理规划大纲.docx
-
纳税基础与实务(说课课件).pptx
-
美术素描课程标准.docx
-
最新部编人教版小学五年级下册语文全册备课教案设计及板书反思.docx
-
植物组织培养教学设计.docx
-
老年科健康教育.docx
-
紧盯“双碳”目标走好绿色低碳“赶考路”PPT课件.pptx
-
肿瘤的绿色治疗.ppt
-
摄影摄像课程标准.docx
-
植物组织培养教案.docx
-
Excel VBA 在工程测量上的应用Word格式.docx
-
整理电力工程建设项目监理典型表式火力发电工程Word文档下载推荐.docx
-
镇雄县度产业扶贫项目文档格式.docx
-
最新高中地理第01章地理环境与区域发展12地理信息技术的应用2限时考新人教版必修3Word格式.docx
-
医院住院信息管理系统文档格式.docx
-
3明洞棚洞施工工艺工法Word文档格式.docx
-
邹魏热电厂煤粉锅炉技术协议文档格式.docx
-
职称英语综合A试题及谜底Word下载.docx
-
12楼砼养护记录表Word格式.docx
-
中国香港创业板的投资启示Word文件下载.docx
-
《背影》研究Word格式文档下载.docx
-
313施工措施文档格式.docx
-
最新苏教版八年级上册物理期中试题带答案1优秀名师资料Word文档格式.docx
-
资产评估师考试《资产评估》模拟试题一中大网校Word格式.docx
-
应用心理硕士复旦大学研究生院Word文档格式.docx
-
1000字检讨书违纪Word文件下载.docx
-
语言学How to do things with wordsWord文件下载.docx
-
中考英语复习学案7上Unit6 Food and lifestyleWord格式文档下载.docx
-
03危害公共安全罪8课时Word格式.docx
