 FB41全参数设置.docx
FB41全参数设置.docx
- 文档编号:11484703
- 上传时间:2023-03-01
- 格式:DOCX
- 页数:17
- 大小:18.63KB
FB41全参数设置.docx
《FB41全参数设置.docx》由会员分享,可在线阅读,更多相关《FB41全参数设置.docx(17页珍藏版)》请在冰豆网上搜索。
FB41全参数设置
序号
参数
数据类型
数值范围
缺省
说明
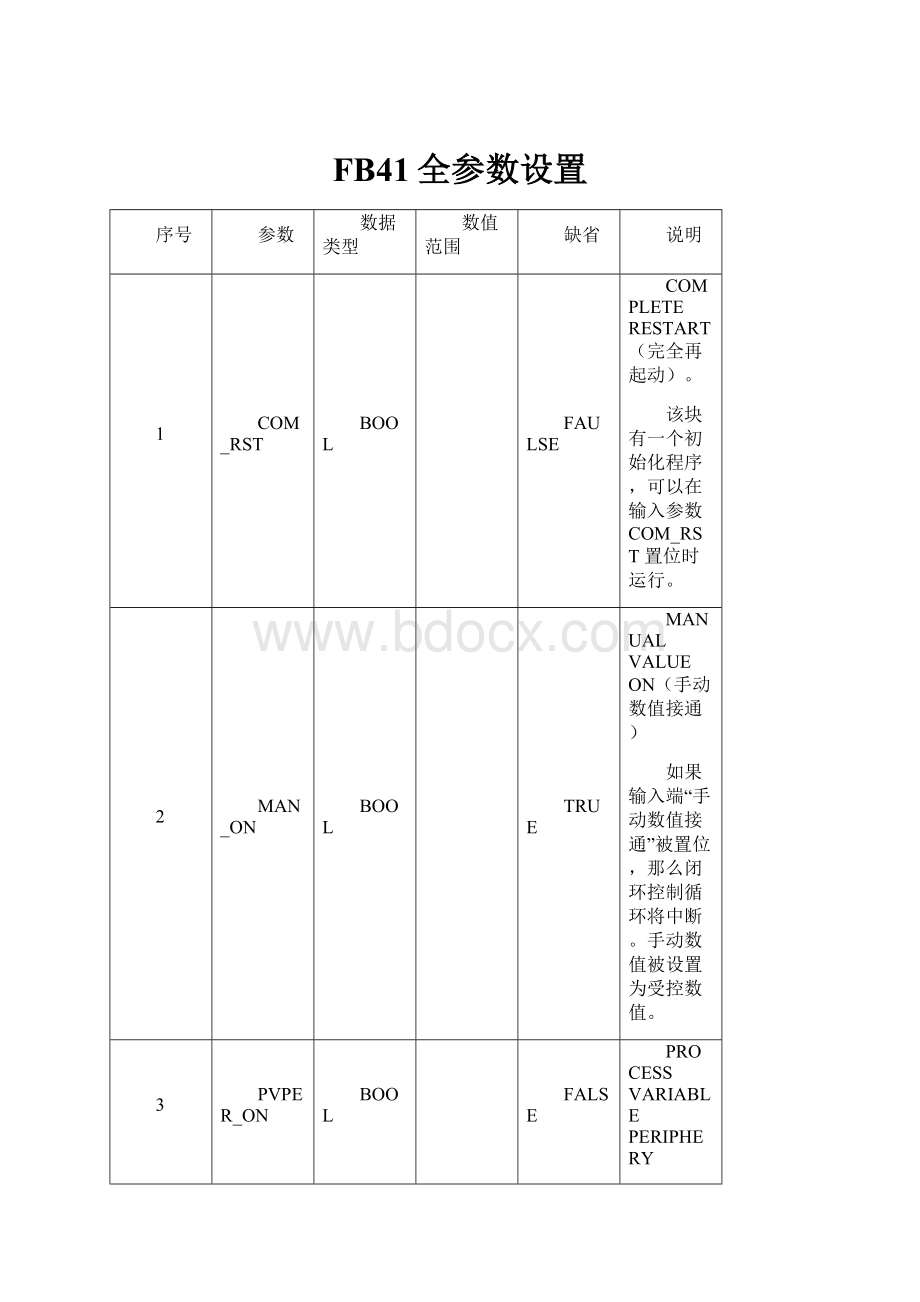
1
COM_RST
BOOL
FAULSE
COMPLETERESTART(完全再起动)。
该块有一个初始化程序,可以在输入参数COM_RST置位时运行。
2
MAN_ON
BOOL
TRUE
MANUALVALUEON(手动数值接通)
如果输入端“手动数值接通”被置位,那么闭环控制循环将中断。
手动数值被设置为受控数值。
3
PVPER_ON
BOOL
FALSE
PROCESSVARIABLEPERIPHERY
ON/(过程变量外设接通)
如果过程变量从I/O读取,输入
“PV_PER”必须连接到外围设备,
并且输入“PROCESSVARIABLE
PERIPHERYON”必须置位。
4
P_SEL
BOOL
TRUE
PROPORTIONALACTIONON(比例分量接通)
PID各分量在PID算法中可以分别激活或者取消。
当输入端“比例分量接通”被置位时,P分量被接通。
5
I_SEL
BOOL
TRUE
INTEGRALACTIONON(积分分量接通)
PID各分量在PID算法中可以分别激活或者取消。
当输入端“积分分量接通”被置位时,I分量被接通。
6
INT_HOLD
BOOL
FALSE
INTEGRALACTIONHOLD(积分分量保持)
积分器的输出被冻结。
为此,必须置
位输入“IntegralActionHold(积分
操作保持)”。
7
I_ITL_ON
BOOL
FALSE
INITIALIZATIONOFTHEINTEGRAL
ACTION(积分分量初始化接通)
积分器的输出可以被设置为输入
“I_ITLVAL”。
为此,必须置位输
入“积分操作的初始化”。
8
D_SEL
BOOL
FALSE
DERIVATIVEACTIONON(微分分量接通)
PID各分量在PID算法中可以分别激活或者取消。
当输入端“微分分量接通”被置位时,D分量被接通。
9
CYCLE
TIME
>=1ms
T#1s
SAMPLETIME(采样时间)
块调用之间的时间必须恒定。
“采
样时间”输入规定了块调用之间的
时间,应该与OB35设定时间保持一致。
10
SP_INT
REAL
-100.0至+100.0(%)或者物理值1
0.0
INTERNALSETPOINT(内部设定点)
“内部设定点”输入端用于确定设定值。
11
PV_IN
REAL
-100.0至+100.0(%)或者物理值1
0.0
PROCESSVARIABLEIN(过程变量输入)
可以设置一个初始值到“过程变量输
入”输入端或者连接一个浮点数格式的外部过程变量。
12
PV_PER
WORD
W#16#0000
PROCESSVARIABLE
PERIPHERY(过程变量外设)
外围设备的实际数值,通过I/O格式的过程变量被连接到“过程变量外围设备”输入端,连接到控制器
13
MAN
REAL
-100.0至+100.0(%)或者物理值2
0.0
MANUALVALUE(手动数值)
“手动数值”输入端可以用于通过操作者接口功能设置一个手动数值。
14
GAIN
REAL
2.0
PROPORTIONALGAIN(比例增益)
“比例增益”输入端可以设置控制器的比例增益系数。
15
TI
TIME
>=CYCLE
T#20s
RESETTIME(复位时间)
“复位时间”输入端确定了积分器的时间响应。
16
TD
TIME
>=CYCLE
T#10s
DERIVATIVETIME(微分时间)
“微商时间”输入端确定了微商单元的时间响应。
17
TM_LAG
TIME
>=(CYCLE/2)
T#2s
TIMELAGOFTHEDERIVATIVE
ACTION(微分分量的滞后时间)
微商操作的算法包括一个时间滞后,可以被赋值给“微分分量的滞后时间”输入端上。
18
DEADB_W
REAL
>=0.0(%)或者物理值1
0.0
DEADBANDWIDTH(死区宽度)
死区用于存储错误。
“死区宽度”输入端确定了死区的容量大小。
19
LMN_HLM
REAL
LMN_LLM至100.0(%)或者物理值2
100.0
MANIPULATEDALUEHIGH
LIMIT(受控数值的上限)
受控数值必须设定有一个“上限”和一个“下限”。
“受控数值上限”输入端确定了“上极限”。
20
LMN_LLM
REAL
-100.0(%)至LMN_HLM或者物理值2
0.0
MANIPULATEDVALUELOW
LIMIT(受控数值的下限)
受控数值必须设定有一个“上限”和一个“下限”。
“受控数值下限”输入端确定了“下极限”。
21
PV_FAC
REAL
1.0
PROCESSVARIABLEFACTOR(过程变量系数)
“过程变量系数”输入端用于和过程
变量相乘。
该输入端可以用于匹配过程变量范围。
22
PV_OFF
REAL
0.0
PROCESSVARIABLEOFFSET(过程变量偏移量)
“过程变量偏移”输入端可以添加到“过程变量”。
该输入端可以用于匹配过程变量的范围。
23
LMN_FAC
REAL
1.0
MANIPULATEDVALUEFACTOR(受控数值系数)
“受控数值系数”输入端用于与受控数值相乘。
该输入端可以用于匹配受控数值的范围。
24
LMN_OFF
REAL
0.0
MANIPULATEDVALUE(受控数值的偏移量)
“受控数值的偏移量”可以与受控数值相加。
该输入端可以用于匹配受控数值的范围。
25
I_ITLVAL
REAL
-100.0至+100.0(%)或者物理值2
0.0
INITIALIZATIONVALUEOFTHE
INTEGRAL-ACTION(积分分量初始化值)
积分器的输出可以用输入端“I_ITL_ON”设置。
初始化数值可以设为“积分分量初始值”输入。
26
DISV
REAL
-100.0至+100.0(%)或者物理值2
0.0
DISTURBANCEVARIABLE(干扰变量)
对于前馈控制,干扰变量被连接到“干扰变量”输入端。
序号
参数
数据类型
数值范围
缺省
说明
1
LMN
REAL
0.0
MANIPULATEDVALUE(受控数值)
有效的受控数值被以浮点数格式输出在“受控数值”输出端上。
2
LMN_PER
WORD
W#16#0000
MANIPULATEDVALUE
PERIPHERY(受控数值外围设备)
I/O格式的受控数值被连接到“受控数值外围设备”输出端上的控制器。
3
QLMN_HLM
BOOL
FALSE
HIGHLIMITOFMANIPULATED
VALUEREACHED(达到受控数值上限)受控数值必须规定一个最大极限和一个最小极限。
“达到受控数值上限”指示已超过最大极限。
4
QLMN_LLM
BOOL
FALSE
LOWLIMITOFMANIPULATED
VALUEREACHED
(达到受控数值下限)
受控数值必须规定一个最大极限和一个最小极限。
“达到受控数值下
限”指示已超过最小极限。
5
LMN_P
REAL
0.0
PROPORTIONALITY
COMPONENT(比例分量)
“比例分量”输出端输出受控数值的比例分量。
6
LMN_I
REAL
0.0
INTEGRALCOMPONENT(积分分量)
“积分分量”输出端输出受控数值的积分分量。
7
LMN_D
REAL
0.0
DERIVATIVECOMPONENT(微分分量)
“微商分量”输出端输出受控数值的微商分量。
8
PV
REAL
0.0
PROCESSVARIABLE(过程变量)
有效的过程变量在“过程变量”输出端上输出。
9
ER
REAL
0.0
ERRORSIGNAL(误差信号)
有效误差在“误差信号”输出端输出。
A:
所有的输入参数:
COM_RST:
BOOL:
重新启动PID:
当该位TURE时:
PID执行重启动功能,复位PID内部参数到默认值;通常在系统重启动时执行一个扫描周期,或在PID进入饱和状态需要退出时用这个位;
MAN_ON:
BOOL:
手动值ON;当该位为TURE时,PID功能块直接将MAN的值输出到LMN,这可以在PID框图中看到;也就是说,这个位是PID的手动/自动切换位;
PEPER_ON:
BOOL:
过程变量外围值ON:
过程变量即反馈量,此PID可直接使用过程变量PIW(不推荐),也可使用PIW规格化后的值(常用),因此,这个位为FALSE;
P_SEL:
BOOL:
比例选择位:
该位ON时,选择P(比例)控制有效;一般选择有效;
I_SEL:
BOOL:
积分选择位;该位ON时,选择I(积分)控制有效;一般选择有效;
INT_HOLDBOOL:
积分保持,不去设置它;
I_ITL_ONBOOL:
积分初值有效,I-ITLVAL(积分初值)变量和这个位对应,当此位ON时,则使用I-ITLVAL变量积分初值。
一般当发现PID功能的积分值增长比较慢或系统反应不够时可以考虑使用积分初值;
D_SEL:
BOOL:
微分选择位,该位ON时,选择D(微分)控制有效;一般的控制系统不用;
CYCLE:
TIME:
PID采样周期,一般设为200MS;
SP_INT:
REAL:
PID的给定值;
PV_IN:
REAL:
PID的反馈值(也称过程变量);
PV_PER:
WORD:
未经规格化的反馈值,由PEPER-ON选择有效;(不推荐)
MAN:
REAL:
手动值,由MAN-ON选择有效;
GAIN:
REAL:
比例增益;
TI:
TIME:
积分时间;
TD:
TIME:
微分时间;
TM_LAG:
TIME:
我也不知道,没用过它,和微分有关;
DEADB_W:
REAL:
死区宽度;如果输出在平衡点附近微小幅度振荡,可以考虑用死区来降低灵敏度;
LMN_HLM:
REAL:
PID上极限,一般是100%;
LMN_LLM:
REAL:
PID下极限;一般为0%,如果需要双极性调节,则需设置为-100%;(正负10V输出就是典型的双极性输出,此时需要设置-100%);
PV_FAC:
REAL:
过程变量比例因子
PV_OFF:
REAL:
过程变量偏置值(OFFSET)
LMN_FAC:
REAL:
PID输出值比例因子;
LMN_OFF:
REAL:
PID输出值偏置值(OFFSET);
I_ITLVAL:
REAL:
PID的积分初值;有I-ITL-ON选择有效;
DISV:
REAL:
允许的扰动量,前馈控制加入,一般不设置;
B:
部分输出参数说明:
LMN:
REAL:
PID输出;
LMN_P:
REAL:
PID输出中P的分量;(可用于在调试过程中观察效果)
LMN_I:
REAL:
PID输出中I的分量;(可用于在调试过程中观察效果)
LMN_D:
REAL:
PID输出中D的分量;(可用于在调试过程中观察效果)
C:
规格化概念及方法:
PID参数中重要的几个变量,给定值,反馈值和输出值都是用0.0~1.0之间的实数表示,
而这几个变量在实际中都是来自与模拟输入,或者输出控制模拟量的
因此,需要将模拟输出转换为0.0~1.0的数据,或将0.0~1.0的数据转换为模拟输出,这个过程称为规格化
规格化的方法:
(即变量相对所占整个值域范围内的百分比对应与27648数字量范围内的量)
对于输入和反馈,执行:
变量*100/27648,然后将结果传送到PV-IN和SP-INT
对于输出变量,执行:
LMN*27648/100,然后将结果取整传送给PQW即可;
D:
PID的调整方法:
一般不用D,除非一些大功率加热控制等惯大的系统;仅使用PI即可,
一般先使I等于0,P从0开始往上加,直到系统出现等幅振荡为止,记下此时振荡
的周期,然后设置I为振荡周期的0.48倍,应该就可以满足大多数的需求。
我记得网络上有许多调整PID的方法,但不记得那么多了,先试试吧。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- FB41 参数设置
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
新版学生自我鉴定8篇文档格式.docx
-
译林版牛津英语八年级下 Unit 4 期末复习练习题有答案Word下载.docx
-
马原练习册Word文档下载推荐.docx
-
物流术语文档格式.docx
-
部编版三年级上册句子专项训练Word文件下载.docx
-
优秀员工 管理人员评选方案Word格式.docx
-
电厂监理工程管理办法Word文档下载推荐.docx
-
人工智能 经典考试题目例题文档格式.docx
-
施工现场防洪防汛应急预案Word文档格式.docx
-
师德模范先进个人材料范文大全Word下载.docx
-
用生活化的理念打造精彩英语课堂Word格式.docx
-
五星级酒店系统建议方案文档格式.docx
-
学年科粤版九年级化学第八单元第五节中档难题提升题word有答案文档格式.docx
-
黑龙江省中等职业学校学生技能大赛成绩Word格式文档下载.docx
-
实用参考房地产经纪人考试业务操作模考习题Word文档下载推荐.docx
-
ALC一级题库091201Word格式文档下载.docx
-
最新人教版七年级英语下册期中期末试题及答案3套Word文档格式.docx
-
报任安书优质课教案及教学设计精选Word格式文档下载.docx
-
合成高分子材料的检测与应用文档格式.docx
