 运动控制实验.docx
运动控制实验.docx
- 文档编号:11258845
- 上传时间:2023-02-26
- 格式:DOCX
- 页数:17
- 大小:86.65KB
运动控制实验.docx
《运动控制实验.docx》由会员分享,可在线阅读,更多相关《运动控制实验.docx(17页珍藏版)》请在冰豆网上搜索。
运动控制实验
第二章运动控制
(一)实验
实验三不可逆单闭环直流调速系统静特性的研究
一.实验目的
1.研究晶闸管直流电动机调速系统在反馈控制下的工作。
2.研究直流调速系统中速度调节器ASR的工作及其对系统静特性的影响。
3.学习反馈控制系统的调试技术。
二.实验系统组成及工作原理
采用闭环调速系统,可以提高系统的动静态性能指标。
转速单闭环直流调速系统是常用的一种形式。
实验图3一1所示是转速单闭环直流调速系统的实验线路图。
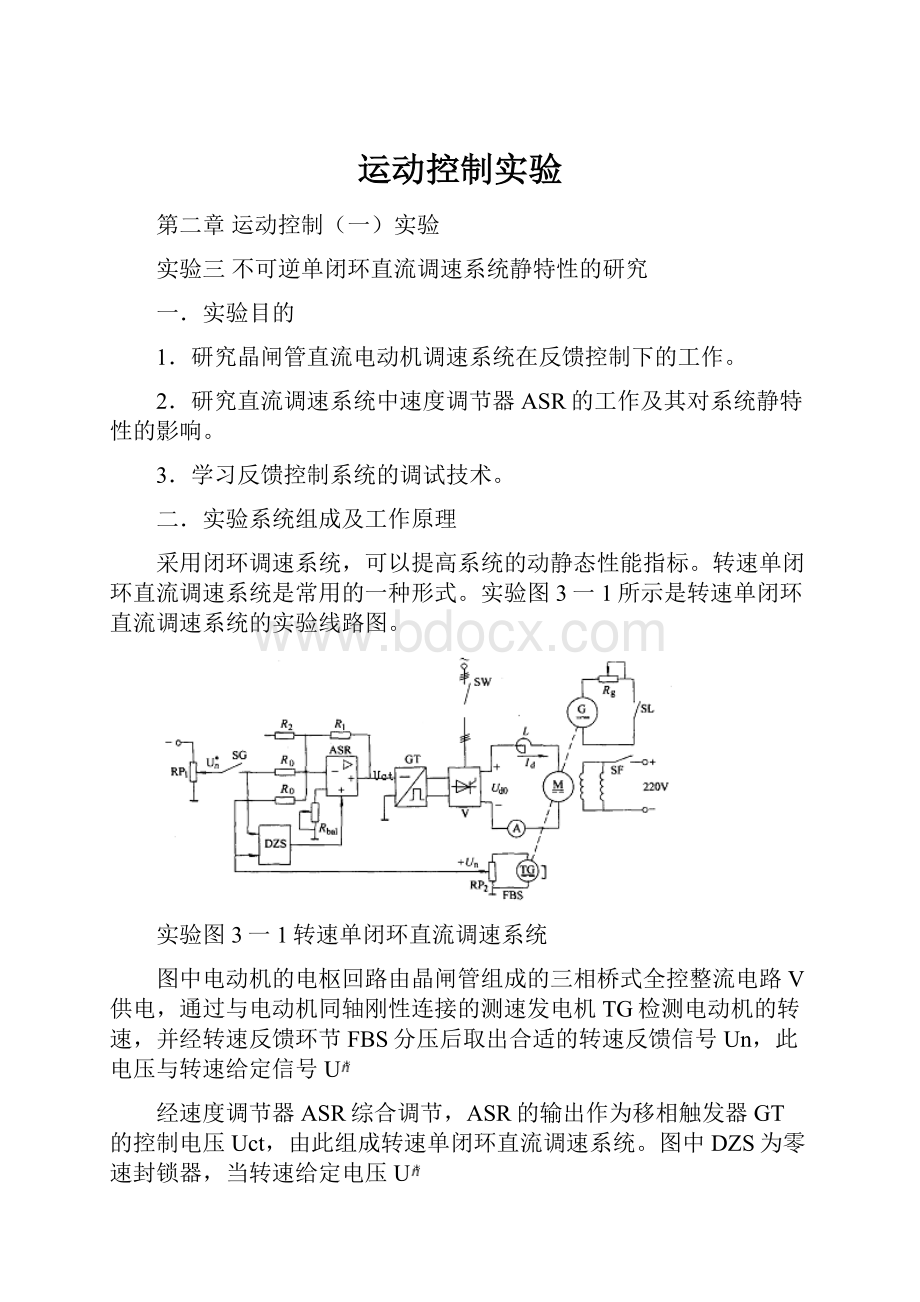
实验图3一1转速单闭环直流调速系统
图中电动机的电枢回路由晶闸管组成的三相桥式全控整流电路V供电,通过与电动机同轴刚性连接的测速发电机TG检测电动机的转速,并经转速反馈环节FBS分压后取出合适的转速反馈信号Un,此电压与转速给定信号U
经速度调节器ASR综合调节,ASR的输出作为移相触发器GT的控制电压Uct,由此组成转速单闭环直流调速系统。
图中DZS为零速封锁器,当转速给定电压U
和转速反馈电压Un均为零时,DZS的输出信号使转速调节器ASR锁零,以防止调节器零漂而使电动机产生爬行。
三、实验设备及仪器
1.MCL—II型电机控制教学实验台主控制屏。
2.MCL—20组件。
3.MCL—03组件。
4.MEL—11电容箱。
5.MEL—03三相可调电阻(或自配滑线变阻器)
6.电机导轨及测速发电机、直流发电机MOl
7.直流电动机M03。
8.双踪示波器。
四.实验内容
1.移相触发电路的调试(主电路未通电)
(a)用示波器观察MCL—20的脉冲观察孔,应有双脉冲,且间隔均匀,幅值相同;观察每个晶闸管的控制极、阴极电压波形,应有幅值为1V-2V的双脉冲。
(b)触发电路输出脉冲应在30º~90º范围内可调。
可通过对偏移电压调节单位器及ASR输出电压的调整实现。
例如:
使ASR输出为0V,调节偏移电压,实现α=90º:
再保持偏移电压不变,调节ASR的限幅电位器RP1,使α=30º。
2.求取调速系统在无转速负反馈时的开环工作机械特性。
a.断开ASR(MCL—03)的“3”至Uct(MCL—20)的连接线,G(给定)直接加至Uct且Ug调至零,直流电机励磁电源开关闭合。
b.合上主控制屏的绿色按钮开关,调节三相调压器的输出,使Uuv、Uvw,Uwu=200V。
c.调节给定电压Ug,使直流电机空载转速no=1500转/分,调节直流发电机负载电阻,在空载至额定负载的范围内测取7-8点,读取整流装置输出电压Ud,输出电流id以及被测电动机转速n。
id(A)
Ud(V)
n(r/min)
3.带转速负反馈有静差工作的系统静特性
a.断开G(给定)和UM的连接线,ASR的输出(“3”)接至Uct把ASR的“5”、“6”点短接。
b.合上主控制屏的绿色按钮开关,调节Uuv、Uvw、Uwu为200伏。
c.调节给定电压认至2V,调整转速变换器RP电位器,使被测电动机空载转速n0=1500转/分,调节ASR的调节电容以及反馈电位器RP3,使电机稳定运行。
调节测功机加载旋钮(或直流发电机负载电阻),在空载至额定负载范围内测取7-8点,读取Ud、id、n。
id(A)
Ud(V)
n(r/min)
4.测取调速系统在带转速负反馈时的无静差闭环工作的静特性
a.断开ASR的“5”、“6”短接线,“5”、“6”端接MEL-11电容器,可预置7uF,使ASR成为PI(比例一积分)调节器。
b.调节给定电压Ug,使电机空载转速no=1500转/分。
在额定至空载范围内测取7-8个点。
id(A)
Ud(V)
n(r/min)
五.注意事项
1.直流电动机工作前,必须先加上直流激磁。
2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)
3.测取静特性时,须注意主电路电流不许超过电机的额定值(IA)。
4.三相主电源连线时需注意,不可换错相序。
5.MCL—20面板的右下端电源开关闭合时,过流保护、过压保护的发光二极管可能会亮,只需按下对应的复位开关SBI、SB2即可正常工作。
6.系统开环连接时,不允许突加给定信号Ug起动电机,同时,三相主电源输出U、V、W尽可能从0V起调。
7.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。
8.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
六.实验报告
1.绘制实验所得静特性,并进行分析、比较。
2.系统调试的心得体会。
七.思考题
1.系统在开环、有静差闭环与无静差闭环工作时,速度调节器ASR各工作在什么状态?
实验时应如何接线?
2.要得到相同的空载转速no,亦即要得到整流装置相同的输出电压Ug对于有反馈与无反馈调速系统哪个情况下给定电压要大些?
为什么?
3.在有转速负反馈的调速系统中,为得到相同的空载转速no,转速反馈的强度对Ug有什么影响?
为什么?
4.如何确定转速反馈的极性与把转速反馈正确地接入系统中?
又如何调节转速反馈的强度,在线路中调节什么元件能实现?
实验四双闭环晶闸管不可逆直流调速系统
一.实验目的
1.了解转速、电流双闭环直流调速系统的组成。
2.掌握双闭环直流调速系统的调试步骤、方法及参数的整定。
3.测定双闭环直流调速系统的静态和动态性能及其指标。
4.了解调节器参数对系统动态性能的影响。
二、实验系统组成及工作原理
双闭环调速系统的特征是系统的电流和转速分别由两个调节器控制,由于调速系统调节的主要参量是转速,故转速环作为主环放在外面,而电流环作为副环放在里面,可以及时抑制电网电压扰动对转速的影响。
实际系统的组成如实验图4一1所示。
实验图4一1转速、电流双闭环直流调速系统
主电路采用三相桥式全控整流电路供电。
系统工作时,首先给电动机加上额定励磁,改变转速给定电压U
可方便地调节电动机的转速。
速度调节器ASR,电流调节器ACR均设有限幅电路,ASR的输出U
作为ACR的给定,利用ASR的输出限幅U
起限制起动电流的作用;ACR的输出Uct作为触发器TG的移相控制电压,利用ACR的输出限幅Ucm起限制αmin的作用。
当突加给定电压U
时,ASR立即达到饱和输出U
盘,使电动机以限定的最大电流Idm加速起动,直到电动机转速达到给定转速(即Un=U
)并出现超调,使ASR退出饱和,最后稳定运行在给定转速(或略低于给定转速)上。
三、实验设备及仪器
1.MCL-II型电机控制教学实验台主控制屏
2.MCL—20挂箱
3.MCL—03组件。
4.MEL—11电容箱。
5.MEL—03三相可调电阻(或自配滑线变阻器)
6.电机导轨及测速发电机、直流发电机M01
7.直流电动机M03。
8.双踪示波器。
9.直流电动机M03
四.实验内容
1.MCL—20的调试
2.各控制单元调试
3.测定电流反馈系数。
4.测定开环机械特性及闭环静特性。
5.闭环控制特性的测定。
6.观察,记录系统动态波形。
五、实验步骤及方法
1.按图接线,未上主电源之前,检查晶闸管的脉冲是否正常。
(1)打开MCL—20电源开关,给定电压有电压显示。
(2)开关设置:
脉冲选择开关不按下,DZS(零速封锁器)的扭子开关扳向“封锁”。
(3)用示波器观察脉冲观察孔,应有间隔均匀,幅度相同的双脉冲。
(4)检查相序,用示波器观察“1”,“2”单脉冲观察孔,“1”脉冲超前“2”脉冲60º,则相序正确,否则,应调整输入电源。
2.MCL—20调试及开关设置
将控制一组桥触发脉冲通断的六个直键开关弹出。
用示波器观察每只晶闸管的控制极,阴极,应有幅度为1V-2V的脉冲。
3.双闭环调速系统调试原则
(1)先部件,后系统。
即先将各单元的特性调好,然后才能组成系统。
(2)先开环,后闭环,即使系统能正常开环运行,然后在确定电流和转速均为负反馈时组成闭环系统。
(3)先内环,后外环。
即先调试电流内环,然后调转速外环。
4.开环外特性的测定
(1)控制电压Uct由给定器Ug直接接入,测功机加载旋钮应逆时针旋到底(或直流发电机所接负载电阻RG断开)。
(2)使Ug=0,调节偏移电压电位器,使α稍大于90º,合上主电路电源,调节调压器旋钮,使Uuv、Uvw、Uwu为200V,逐渐增加给定电压Ug,使电机起动、升速,调节Ug使电机空载转速n0=1500r/min,再调节测功机加载旋钮(或负载电阻RG),改变负载,在直流电机空载至额定负载范围,测取7~8点,读取电机转速n,电机电枢电流Id,即可测出系统的开环外特性n=f(Id)。
Id(A)
Ud(V)
n(r/min)
注意,若给定电压Ug为0时,电机缓慢转动,则表明α太小,需后移。
5.单元部件调试
ASR调试方法与实验二相同。
ACR调试:
使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使脉冲前移α≤30º,使脉冲后移β=30º,反馈电位器RP3逆时针旋到底,使放大倍数最小。
6.系统调试
将Ublf接地,Ublr悬空,即使用一组桥六个晶闸管。
(1)电流环调试
电动机不加励磁
(a)系统开环,即控制电压Uct由给定器Ug直接接入,开关S拨向左边,主回路接入电阻Rd并调至最大(Rd由MEL-03的两只900。
电阻并联)。
逐渐增加给定电压,用示波器观察晶闸管整流桥两端电压波形。
在一个周期内,电压波形应有6个对称波头平滑变化。
(b)增加给定电压,减小主回路串接电阻Rd,直至Id=1.lIed,再调节MCL—20挂箱上的电流反馈电位器RP,使电流反馈电压Ufi近似等于速度调节器ASR的输出限幅值(ASR的输出限幅可调为±5V)。
(c)MCL—20的G(给定)输出电压Ug接至MCL—03上ACR的“3”端,ACR的输出“7”端接至Uct,即系统接入已接成PI调节的ACR组成电流单闭环系统。
ASR的“9”、“10”端接MEL—ll电容器,可预置7Μf,同时,反馈电位器RP3逆时针旋到底,使放大倍数最小。
逐渐增加给定电压Ug使之等于ASR输出限幅值(+5V),观察主电路电流是否小于或等于1.1Ied,如Id过大,则应调整电流反馈电位器,使Ufi增加,直至Id<1.lIed;如Id 测定并计算电流反馈系数 (2)速度变换器的调试 电动机加额定励磁 (a)系统开环,即给定电压Ug直接接至Uct,Ug作为输入给定,逐渐加正给定,当转速n=1500r/min时,调节MCL—03挂箱上的FBS(速度变换器)中速度反馈电位器RP,使速度反馈电压为+5V左右,计算速度反馈系数。 注: 反馈电压可由MCL—03上部的数显窗读出,通过直键开关的切换可分别指示FBS,ASR,ACR的输出电压值。 (b)速度反馈极性判断: 系统中接入ASR构成转速单闭环系统,即给定电压Ug接至ASR的第2端,ASR的第3端接至Uct。 调节Ug(Ug为负电压),若稍加给定,电机转速即达最高速且调节Ug不可控,则表明单闭环系统速度反馈极性有误。 但若接成转速一电流双闭环系统,由于给定极性改变,故速度反馈极性可不变。 7.系统特性测试 将ASR,ACR均接成PI调节器接入系统,形成双闭环不可逆系统。 ASR的调试: (a)反馈电位器RP3逆时针旋到底,使放大倍数最小; (b)“5”、“6”端接入MEL—11电容器,预置5~7μF: (c)调节RPl、RP2使输出限幅为±5V. (1)机械特性n=f(Id)的测定 调节转速给定电压Ug,使电机空载转速至1500r/min,再调节测功机加载旋钮(或发电机负载电阻取),在空载至额定负载范围内分别记录7~8点,可测出系统静特性曲线n=f(Id) Id(A) Ud(V) n(r/min) (2)闭环控制特性n=f(Ug)的测定 调节Ug,记录Ug和n,即可测出闭环控制特性n=f(Ug)。 n(r/min) Ug(V) 8.系统动态波形的观察 用二踪慢扫描示波器观察动态波形,用光线示波器记录动态波形。 在不同的调节器参数下,观察,记录下列动态波形: (1)突加给定起动时,电动机电枢电流波形和转速波形。 (2)突加额定负载时,电动机电枢电流波形和转速波形。 (3)突降负载时,电动机电枢电流波形和转速波形。 注: 电动机电枢电流波形的观察可通过MCL-03的ACR的第“1”端,转速波形的观察可通过MCL-03的ASR的第“1”端 六、实验注意事项 1.三相主电源连线时需注意,不可换错相序。 2.MCL—20面板的右下端电源开关闭合时,过流保护、过压保护的发光二极管可能会亮,只需按下对应的复位开关SBl、SB2即可正常工作。 3.系统开环连接时,不允许突加给定信号U: 起动电机,同时,三相主电源输出U、V、W尽可能从0V起调。 4.起动电机时,需把MEL-13的测功机加载旋钮逆时针旋到底,以免带负载起动。 5.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。 6.进行闭环调试时,若电机转速达最高速且不可调,注意转速反馈的极性是否接错。 7.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。 七.实验报告 1.根据实验数据,画出闭环控制特性曲线。 2.根据实验数据,画出闭环机械特性,并计算静差率。 3.根据实验数据,画出系统开环机械特性,计算静差率,并与闭环机械特性进行比较。 4.分析由光线示波器记录下来的动态波形。 第三章运动控制 (二)实验 实验六双闭环三相异步电动机调压调速系统 一.实验目的 1.熟悉相位控制交流调压调速系统的组成与工作。 2.了解并熟悉双闭环三相异步电动机调压调速系统的原理及组成。 3.了解绕线式异步电动机转子串电阻时在调节定子电压调速时的机械特性。 4.通过测定系统的静特性和动态特性进一步理解交流调压系统中电流环和转速环的作用。 二.实验内容 1.测定绕线式异步电动机转子串电阻时的人为机械特性。 2.测定双闭环交流调压调速系统的静特性。 3.测定双闭环交流调压调速系统的动态特性。 三.实验系统组成及工作原理 双闭环三相异步电动机调压调速系统的主电路为三相晶闸管交流调压器TVC及三相绕线式异步电动机M(转子回路串电阻)。 控制系统由零速封锁器DZS、电流调节器ACR,速度调节器ASR、电流变换器FBC,速度变换器FBS,触发器GT、脉冲放大器AP1等组成。 其系统原理图如实验图6一1所示。 实验图6一1双闭环三相异步电动机调压调速系统原理图 整个系统采用了速度、电流两个反馈控制环。 这里的速度环作用基本上与直流调速系统相同,而电流环的作用则有所不同。 在稳定运行的情况下,电流环对电网扰动仍有及时的抗扰作用,但在起动过程中电流环仅起限制最大电流的作用,不会出现最佳起动的恒流特性,也不可能是恒转矩起动。 异步电动机调压调速系统结构简单,采用双闭环时静差率较小,且比较容易实现正、反转、反接和能耗制动。 但在恒转矩负载下不能长时间低速运行,因为低速运行时转差功率Ps=sPm全部消耗在转子电阻中,时间长了会使转子过热。 四.实验设备和仪器 1.MCL-II型电机控制教学实验台主控制屏 2.MCL-20挂箱 3.MCL-3挂箱 4.二踪慢扫描示波器 5.万用电表 6.MEL-03(或自配滑线电阻器) 7.MEL-I1电容挂箱 8.光线示波器 9.电机导轨及测速发电机、直流发电机M01。 10.绕线式异步电动机 五.注意事项 1.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的R.P3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。 3.测取静特性时,须注意电流不许超过电机的额定值(0.55A)。 4.三相主电源连线时需注意,不可换错相序。 5.MCL-20面板的右下端电源开关闭合时,过流保护、过压保护的发光二极管可能会亮,只需按下对应的复位开关SBI、SB2即可正常工作。 6.系统开环连接时,不允许突加给定信号U9起动电机,同时,三相主电源输出U、V、W尽可能从0V起调。 7.起动电机时,需把滑线电阻器旋钮逆时针旋到底,以免带负载起动。 8.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。 9.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。 10.低速实验时,实验时间应尽量短,以免电阻器过热引起串接电阻数值的变化。 11.绕线式异步电动机: PN=100W,UN=220V,IN=0.55A,nN=1350,MN=0.68,Y接。 六.实验方法 1.移相触发电路的调试(主电路未通电) (a)用示波器观察MCL-20的单、双脉冲观察孔,应有双脉冲,且间隔均匀,幅值相同;将G输出直接接至Uct,调节Uct。 (b)将面板上的Ublf端接地,调节偏移电压Ub,使Uct=0时,α接近150º,观察晶闸管的触发脉冲是否正常(应有幅值为1V-2V的双脉冲)。 (c)触发电路输出脉冲应在30º~90º范围内可调。 可通过对偏移电压调节电位器及ASR输出电压的调整实现。 例如: 使ASR输出为0V,调节偏移电压,实现α=90º;再保持偏移电压不变,调节ASR的限幅电位器RP1,使α=30º。 2.控制单元调试 按直流调速系统方法调试各单元 3.求取调速系统在无转速负反馈时的开环工作机械特性。 a.断开ASR(MCL-03)的“3”至Uct: (MCL-20)的连接线,G(给定)直接加至Uct,且Ug调至零。 直流电机励磁电源开关闭合。 电机转子回路接入每相为l0Ω左右的三相电阻。 b.合上主控制屏的绿色按钮开关,调节三相调压器的输出,使Uuv,Uvw,Uwu=230V。 c.调节给定电压Ug,使电机空载转速n=1300转/分,调节直流发电机负载电阻,在空载至额定负载的范围内测取7~8点,读取测功机输出转矩M(或直流发电机输入电压Ud,输出电流id)以及被测电动机转速n。 n(r/min) IG(A) UG(V) M(N.m) 注: 若采用直流发电机,转矩可按下式计算 M=9.55(IGUG+I RS+Po)/n 式中: M一三相异步电动机电磁转矩; IG一直流发电机电流; UG一直流发电机电压; Rs一直流发电机电枢电阻; P0一机组空载损耗。 不同转速下取不同数值: n=1500r/min,Po=13.5W;n=1000r/min,Po=10W;n=500r/min,Po=6W。 d.调节Ug,降低电机端电压,在1/3Ue及2/3Ue时重复上述实验,以取得一组人为机械特性。 4.系统调试 (1)调压器输出接三相电阻负载,观察输出电压波形是否正常。 (2)将系统接成双闭环调压调速系统,转子回路仍串每相10Ω左右的电阻,渐加给定Ug至+5V,节FBS的反馈电位器,使电机空载转速n0=300转/分电机运行是否正常。 (3)调节ASR.ACR的外接电容及放大倍数调节电位器,用慢扫描示波器观察突加给定的动态波形,确定较佳的调节器参数。 5.系统闭环特性的测定 调节Ug,使转速至n=1300r/min,从轻载按一定间隔做到额定负载,测出闭环静特性。 n=f(M)。 n(r/min) IG(A) UG(V) M(N.m) 系统动态特性的观察 用慢扫描示波器观察并用光线示波器记录: (1)突加给定起动电机时转速n,电机定子电流i及ASR输出Ugi的动态波形。 (2)电机稳定运行,突加,突减负载时的n,Ugi,i的动态波形。 七.实验报告 1.根据实验数据,画出开环时,电机人为机械特性。 2.根据实验数据,画出闭环系统静特性,并与开环特性进行比较。 3.根据记录下的动态波形分析系统的动态过程。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 运动 控制 实验
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《JAVA编程基础》课程标准软件16级.docx
《JAVA编程基础》课程标准软件16级.docx
-
《分数的初步认识》.docx
-
《金属钠的性质与应用》教学设计.docx
-
《蚕妇》.docx
-
《会计》教材Word版第14章非货币性资产交换.docx
-
《与朱元思书》教学案例及反思.docx
-
《小壁虎借尾巴 》教案.docx
-
1第一部分 辅导员岗位基本知识.docx
-
09年CFO复习题.docx
-
2G1计算书.docx
-
17 古诗五首夜雨寄北一等奖教案.docx
-
240T15mw机组整体启动方案解析.docx
-
485总线设计方案加上位机扩展.docx
-
Aspose Word模板使用总结.docx
-
CDMA掉话分析.docx
-
C++新闻信息管理系统.docx
-
《HSE管理体系的策划与运行》.docx
-
c语言改错题及答案.docx
-
CMS7000使用说明资料.docx
-
《财经法规与会计职业道德》模拟卷考试试题及答案资料.docx
-
《大众传播媒介的更新》教案2.docx
-
《教育知识与能力》中学版全国教师资格考试复习资料教学教材.docx
-
EPC施工组织设计1.docx
-
ERP在服装行业的信息化应用可行性研究报告.docx
-
《项羽之死》教案人教版高二选修教学设计.docx
-
《公共关系实务》总复习资料.docx
-
FLUKE744过程校准仪经典实例免费给大家会让你未来的道路更通达.docx
-
《护士条例》试题.docx
-
2F男鞋统装规范84.docx
-
4测试用例修复方法与工具.docx
-
MC尼龙轮项目可行性研究报告.docx
-
Weblogic Server系统管理手册.docx
-
小学生交通安全知识讲座演讲稿五篇.docx
-
以环保为主题的演讲比赛讲话稿5篇.docx
-
小学数学小学四年级数学应用题精选100道.docx
-
小学学校教研工作总结范文doc.docx
-
异径等径三通规格对照表.docx
-
小学英语五年级下册新版牛津上海版复习特训八十四.docx
-
小学语文作文优秀教案课程.docx
-
银行行长关于述职报告最新篇.docx
-
英文阅读illusionofpastoralpeace.docx
-
语文心得之巧设语境识字.docx
-
校园安全小常识 2.docx
-
渊海子平内外十八格.docx
-
校长师德师风演讲稿.docx
-
员工持股激励方案模板标准版.docx
-
写作文梗概优秀作文500字.docx
-
英语口语.docx
-
英语语法00288.docx
-
远程教育培训作业.docx
-
心内科诊疗常规合成版本1130.docx
