 spruce STM32智能小车测试报告.docx
spruce STM32智能小车测试报告.docx
- 文档编号:10866316
- 上传时间:2023-02-23
- 格式:DOCX
- 页数:12
- 大小:113.89KB
spruce STM32智能小车测试报告.docx
《spruce STM32智能小车测试报告.docx》由会员分享,可在线阅读,更多相关《spruce STM32智能小车测试报告.docx(12页珍藏版)》请在冰豆网上搜索。
spruceSTM32智能小车测试报告
SpruceSTM32智能小车测试报告
SpruceSTM32使用说明:
Spruce上搭载了STM32处理器,STM32虽然是Cortex-M3内核的32位ARM,但是一方面可以将它作为ARM来使用,另一方面也可以将它作为arduino来使用,arduino环境下的程序可以直接拿过来使用,但要在与spruce配套的集成开发环境maple-ide下编译之后通过USB转串口线下载到STM32中,只有个别函数用法与之前不一样,例如PWM与之前的arduino环境中使用不一样,只需稍作修改即可
Spruce下载方法:
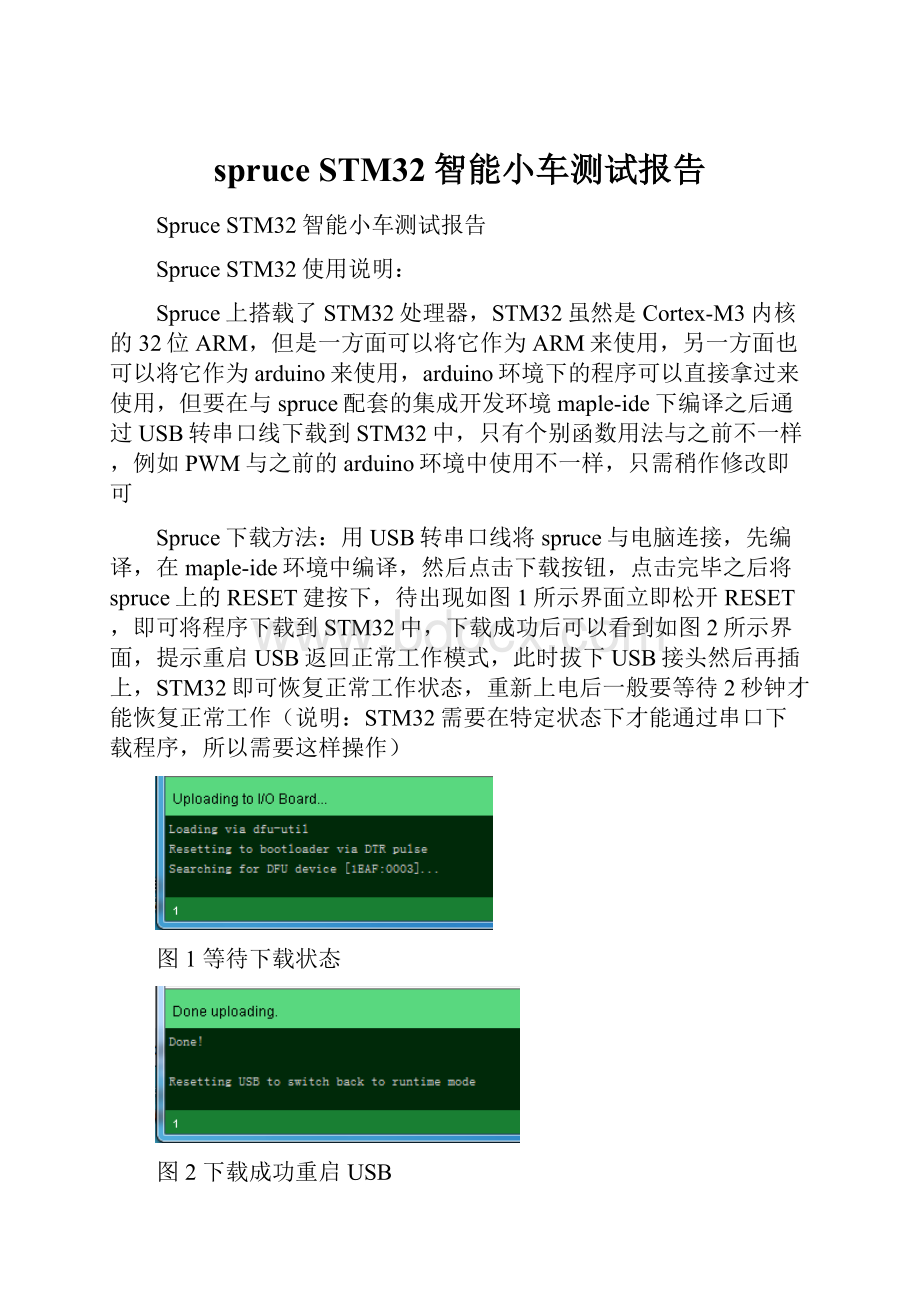
用USB转串口线将spruce与电脑连接,先编译,在maple-ide环境中编译,然后点击下载按钮,点击完毕之后将spruce上的RESET建按下,待出现如图1所示界面立即松开RESET,即可将程序下载到STM32中,下载成功后可以看到如图2所示界面,提示重启USB返回正常工作模式,此时拔下USB接头然后再插上,STM32即可恢复正常工作状态,重新上电后一般要等待2秒钟才能恢复正常工作(说明:
STM32需要在特定状态下才能通过串口下载程序,所以需要这样操作)
图1等待下载状态
图2下载成功重启USB
硬件环境:
车体为双轮带减速齿轮的直流马达驱动,配以万向轮,控制器为SpruceSTM32控制板,电机驱动板为L298N,驱动2路直流电机,传感器有路径传感器:
探测黑色轨迹,路障传感器。
电源使用12V电源,赛道为1.5cm的黑色白底的赛道。
软件环境:
maple-ide编译环境
接线说明:
电机驱动板:
I1:
2
I2:
1
I3:
5
I4:
6
EA:
11
EB:
12
蓝线—接左侧GND
紫线—接左侧VCC
灰线—接右侧GND
绿线—接右侧VCC
备注:
由于左右侧VCC/GND是与stepmotor接口接在一起的,故本测试使用的是stepmotor接口
路径传感器:
Q1—15,Q2—16,Q3—17,Q4—18,Q5—19
路障传感器:
15(接左边传感器)16(接前方传感器)、17(接右边传感器)、
红色:
接4.5-5V电源高电平(加个限流电阻更好)
黄色:
接单片机,输出TTL电平给单片机(加上拉电阻更好)
黑色:
接GND0V电源低电平
图3路径传感器
图4小车模型
图5红外避障传感器
系统工作说明:
系统功能分为循迹和避障功能
循迹功能:
接通电源小车会沿着地上的黑线行驶,小车配有5个路径传感器,当中间的传感器检测到黑线,则小车前进;当中间偏右的传感器检测到黑线,说明小车向右微偏,小车应向左轻微转动;当最右侧的传感器检测到黑线,说明小车向右大偏,小车应向左大幅度转动。
具体可通过PWM控制L298N使能端EA、EB来控制小车的速度,通过控制delay()延时来控制小车转动的角度。
依此类推小车左侧传感器检测到黑线则刚好相反。
(此小车搭载传感器只能寻黑线)
避障功能:
小车前方装有三个红外避障传感器,当检测到障碍物,相应的传感器会输出低电平。
当前方检测到障碍物,则小车后退点然后默认再右转;右侧检测到障碍物,小车左转;左侧检测到障碍物,小车右转;三个方向都没有障碍物前进;另外当左前后或左右检测到障碍物后退点然后默认再右转;左前方检测到障碍物右转;右前方检测到障碍物左转,总共有八种情况。
注意每次转动幅度不要太大,可以使用程序进行多次轻微调整方向,以便使小车能贴着障碍物边缘前进,具体可通过PWM控制L298N使能端EA、EB来控制小车的速度,通过控制delay()延时来控制小车转动的角度。
可以通过调整传感器后的电位器来调整检测距离,检测距离不要太远,一般控制在30CM为宜,由此小车可以实现避障的功能,遇到死胡同,小车能贴壁走出来。
测试代码:
------------------------------------------------
避障代码:
------------------------------------------------
unsignedcharstatus=0;
voidsetup()
{
pinMode(1,OUTPUT);
pinMode(2,OUTPUT);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(15,INPUT);
pinMode(16,INPUT);
pinMode(17,INPUT);
pinMode(11,PWM);
pinMode(12,PWM);
}
voidloop()
{
status=digitalRead(15)+digitalRead(16)*2+digitalRead(17)*4;
switch(status)
{
case0b00000000:
case0b00000101:
back();
delay(100);
turn_right();
pwmWrite(12,15000);
delay(100);
break;
///////////////////////////////////////////
case0b00000001:
case0b00000011:
case0b00000010:
turn_right();
pwmWrite(12,15000);
delay(10);
break;
////////////////////////////////////////
case0b00000100:
case0b00000110:
turn_left();
pwmWrite(11,15000);
delay(10);
break;
///////////////////////////////////
/*case0b00000111:
forward();
delay(30);
break;*/
///////////////////////////////////
default:
forward();
delay(20);
}
}
voidturn_left(void)
{
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
pwmWrite(11,30000);
pwmWrite(12,30000);
}
voidturn_right(void)
{
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
digitalWrite(5,LOW);
digitalWrite(6,HIGH);
pwmWrite(11,30000);
pwmWrite(12,30000);
}
voidforward(void)
{
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
pwmWrite(11,28000);
pwmWrite(12,30000);
}
voidback(void)
{
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,HIGH);
pwmWrite(11,30000);
pwmWrite(12,30000);
}
------------------------------------------------
循迹代码:
------------------------------------------------
unsignedcharroad=0;
voidsetup()
{
pinMode(1,OUTPUT);
pinMode(2,OUTPUT);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
pinMode(11,PWM);
pinMode(12,PWM);
pinMode(15,INPUT);
pinMode(16,INPUT);
pinMode(17,INPUT);
pinMode(18,INPUT);
pinMode(19,INPUT);
Serial1.begin(9600);
}
voidloop()
{
Serial1.write("Arduino!
\r\n");
////////////////////////////////////////////
road=digitalRead(15)+digitalRead(16)*2+digitalRead(17)*4+
digitalRead(18)*8+digitalRead(19)*16;
switch(road)
{
case0b00011011:
forward();
delay(100);
break;
///////////////////////////////////////////
case0b00011101:
turn_left();
pwmWrite(11,17000);
delay(50);
break;
case0b00010111:
turn_right();
pwmWrite(12,17000);
delay(50);
break;
////////////////////////////////////////
case0b00001111:
turn_right();
delay(50);
break;
case0b00011110:
turn_left();
delay(50);
break;
///////////////////////////////////
default:
forward();
delay(10);
}
}
voidturn_left(void)
{
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
pwmWrite(11,35000);
pwmWrite(12,35000);
}
voidturn_right(void)
{
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
pwmWrite(11,35000);
pwmWrite(12,35000);
}
voidforward(void)
{
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
pwmWrite(11,35000);
pwmWrite(12,35000);
}
voidback(void)
{
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
pwmWrite(11,17000);
pwmWrite(12,17000);
}


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- spruce STM32智能小车测试报告 STM32 智能 小车 测试报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
高强度表面硬化钢的开发.docx
-
冀教版小学美术一年级上册教案.docx
-
测绘类测绘标准.docx
-
触动心灵的力量作文29篇汇总.docx
-
春秋战国诸侯.docx
-
党员生活会个人对照材料范文3篇.docx
-
行政教师量化考核方案.docx
-
高考文综政治题内蒙古等地区用.docx
-
顶级销售大师经典案例.docx
-
国际商务单证实务参考答案.docx
-
关于投资合作的合同协议.docx
-
工程力学《剪力图与弯矩图》教学板书设计总结.docx
-
教师跟班学习个人心得体会.docx
-
独立系统 21042回风顺槽揭2#煤层措施.docx
-
会计基础综合题试算平衡表含答案2.docx
-
国庆晚会串场主持词.docx
-
广东省疾病预防控制中心仪器设备检定校准项目采购单位广东.docx
-
沪粤版八年级物理上册14节暑期系列练及答案解析.docx
-
高中生物届人教版通过激素的调节及神经调节与体液调节的关系名师精编单元测试.docx
