 智能灭火机器人设计第程序.docx
智能灭火机器人设计第程序.docx
- 文档编号:10682047
- 上传时间:2023-02-22
- 格式:DOCX
- 页数:28
- 大小:18.76KB
智能灭火机器人设计第程序.docx
《智能灭火机器人设计第程序.docx》由会员分享,可在线阅读,更多相关《智能灭火机器人设计第程序.docx(28页珍藏版)》请在冰豆网上搜索。
智能灭火机器人设计第程序
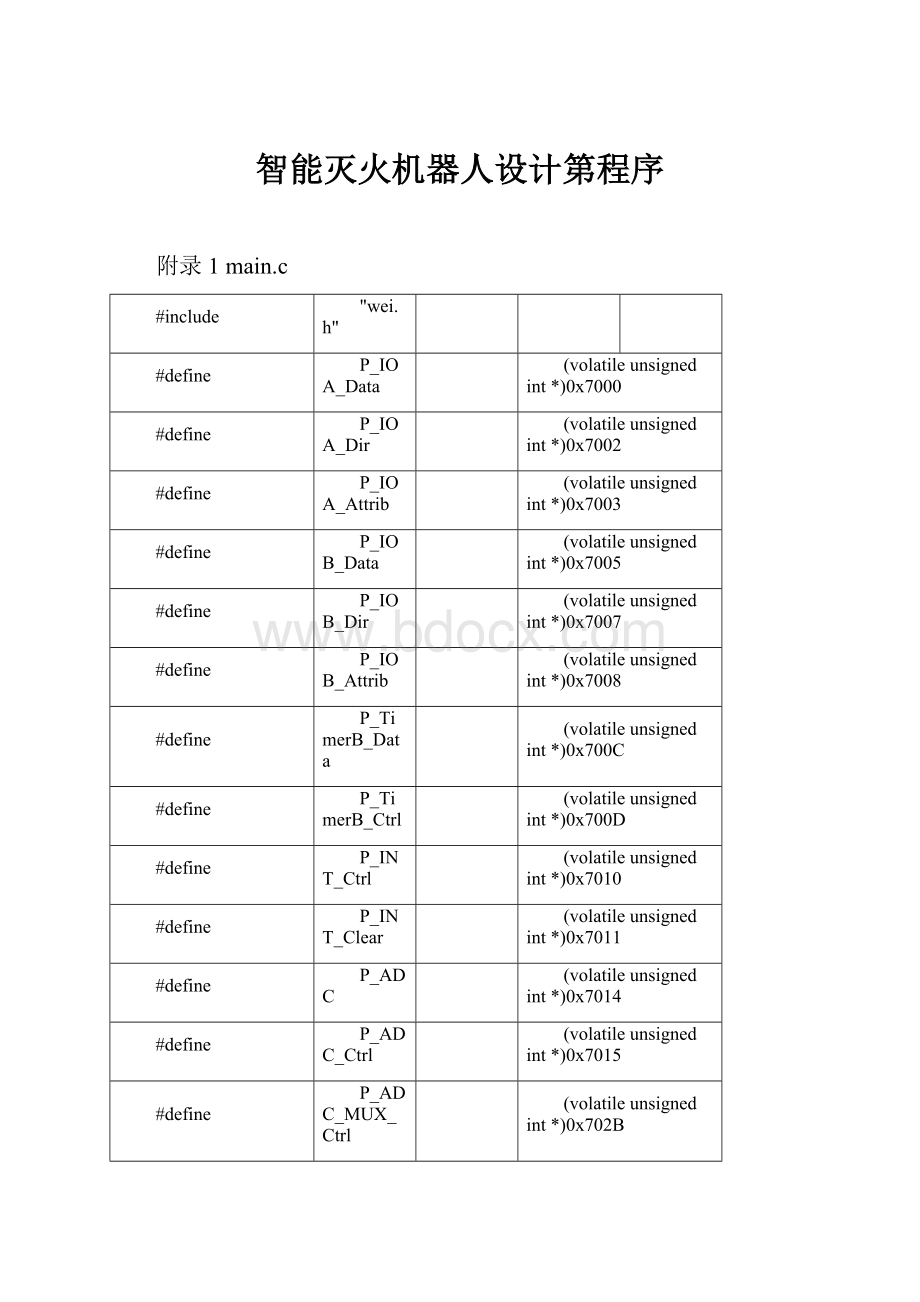
附录1main.c
#include
"wei.h"
#define
P_IOA_Data
(volatileunsignedint*)0x7000
#define
P_IOA_Dir
(volatileunsignedint*)0x7002
#define
P_IOA_Attrib
(volatileunsignedint*)0x7003
#define
P_IOB_Data
(volatileunsignedint*)0x7005
#define
P_IOB_Dir
(volatileunsignedint*)0x7007
#define
P_IOB_Attrib
(volatileunsignedint*)0x7008
#define
P_TimerB_Data
(volatileunsignedint*)0x700C
#define
P_TimerB_Ctrl
(volatileunsignedint*)0x700D
#define
P_INT_Ctrl
(volatileunsignedint*)0x7010
#define
P_INT_Clear
(volatileunsignedint*)0x7011
#define
P_ADC
(volatileunsignedint*)0x7014
#define
P_ADC_Ctrl
(volatileunsignedint*)0x7015
#define
P_ADC_MUX_Ctrl
(volatileunsignedint*)0x702B
#define
P_ADC_MUX_Data
(volatileunsignedint*)0x702C
#define
C_FIQ_PWM
0x8000
//P_INT_Ctrl
#define
C_FIQ_TMA
0x2000
//P_INT_Ctrl
#define
C_FIQ_TMB
0x0800
//P_INT_Ctrl
#define
C_IRQ4_1KHz
0x0010
//P_INT_Ctrl
#define
C_IRQ4_2KHz
0x0020
//P_INT_Ctrl
#define
C_IRQ4_4KHz
0x0040
//P_INT_Ctrl
#define
C_IRQ5_2Hz
0x0004
//P_INT_Ctrl
#define
C_IRQ5_4Hz
0x0008
//P_INT_Ctrl
#define
C_TMB_32KHz
0x0002
//P_TimerB_Ctrl
#define
C_TMB_PWM_OFF
0x0000
//P_TimerB_Ctrl
#define
P_Watchdog_Clear
(volatileunsignedint*)0x7012
unsigned
intmm,min,cny,Delaynumber,xp=255,flag,dd;
unsigned
intleft,right;
unsigned
intpulse_x,pulse_y;
unsigned
intpaixu[7];//
排序
unsigned
intchdata[7];//
火焰传感器检测通道
unsigned
intworkstate=0;
//
进入检测范围
unsigned
intsucessfire=0;
//灭火成功标记
void
PWM_left(unsignedinthigh_time,unsignedintcyclical_time);
void
PWM_right(unsignedinthigh_time,unsignedintcyclical_time);
void
forward(unsignedintm,unsignedintn);
void
forward_s(unsignedintm,unsignedintn);
void
forward_s2(unsignedintm,unsignedintn);
void
backward(unsignedintm,unsignedintn);
void
turn_left(unsignedintm);
void
turn_right(unsignedintm);
void
stop(void);
voidget_AD(void);//AD转换
voidsystem_init(void);//系统初始化
voiddelay_ms(unsignedintt);//ms级延时程序
voiddelay_s(unsignedintt);//s级延时程序
void
adjust(void);//
调整
void
adjust_s(void);//
粗调
void
seekfire(void);//
寻找火源
void
fire(void);//
灭火
void
hf(void);
intabs(intm);
voidbizhan(void);//
避障
voidbiya(void);//
避崖
void
Stage0(void);//
阶段0
void
Stage1(void);//
阶段1
void
Stage2(void);//
阶段2
void
Stage3(void);//
阶段3
void
revison();//
修正函数
//++++++++++++主函数++++++++++++++++++//
intmain(void)
{
system_init();
delay_s(3);
while
(1)
{
seekfire();
fire();
delay_s(8);
}
}
//***************系统初始化*********************//
voidsystem_init(void)
{
__asm("INTOFF");
*P_IOA_Dir=0xE700;//
*P_IOA_Attrib=0xE7FF;
*P_IOA_Data=0x1800;
*P_IOB_Dir=0x0FFF;
*P_IOB_Attrib=0x0FFF;
*P_IOB_Data=0xF000;
*P_TimerB_Ctrl=(C_TMB_32KHz|C_TMB_PWM_OFF);
*P_TimerB_Data=(65536-0.1*0.001*32768);
*P_INT_Ctrl|=(C_FIQ_TMB+C_IRQ4_1KHz+C_IRQ5_2Hz+C_IRQ5_4Hz);//TMB
用来控制
2个电机,
1KHZ控制避崖,
__asm("INTIRQ,FIQ");
//2HZ
用来控制
AD采集
4HZ
用来避
障
}
//***************寻找火源*********************//
voidseekfire(void)
{
Stage0();//
Stage1();//
阶段
阶段
0
1
按一定的路径走
有发现火源,做初步调整
Stage2();//
Stage3();//
阶段
阶段
2
3
接近火源,边走边调整
到达火源前面,做最后的调整
}
voidStage0(void)//
阶段
0
{
flag=0;
while
(1)
{
turn_left(120);//转360度扫描有没有火源
forward(250,250);
if(workstate==1&&flag==0)break;
}
}
voidStage1(void)//
阶段1
{
flag=1;
Set_IOB_Data(0,1);
//
开启蜂鸣器报警
adjust_s();
switch(mm)
{
case1:
forward(60,60);break;
case2:
forward(55,55);
break;
case3:
forward(50,50);
break;
case4:
forward(45,45);
break;
case5:
forward(35,35);
break;
case6:
forward(30,30);
break;
case7:
forward(20,20);
break;
case8:
forward(10,10);
break;
case9:
forward(5,5);
break;
case10:
forward(2,2);
break;
case11:
forward_s(1,1);break;
default:
break;
}
}
voidStage2(void)//阶段2
{
flag=2;
while
(1)
{
adjust();
switch(mm)
{
case1:
forward(40,40);break;
case2:
forward(30,30);break;
case3:
forward(25,25);break;
case4:
forward(20,20);break;
case5:
forward(18,18);break;
case6:
forward(15,15);break;
case7:
forward(12,12);break;
case8:
forward(10,10);break;
case9:
forward(5,5);break;
case10:
forward(2,2);break;
case11:
forward_s(1,1);break;
default:
break;
}
if(chdata[3]<=0x05||chdata[4]<=0x05)
break;
}
}
voidStage3(void)//
阶段
3
灭火前最后调整
{
unsignedinti;
flag=3;
for(i=0;i<20;i++)
{
if(chdata[3]<=0x05&&
chdata[4]<=0x05
&&abs(chdata[3]-chdata[4])<=2
&&abs(chdata[2]-chdata[5])<=8)break;
if(chdata[3]<=0x05&&chdata[4]>0x05){turn_left
(1);delay_ms(10);}if(chdata[3]>0x05&&chdata[4]<=0x05){turn_right
(1);delay_ms(10);}
}
stop();
}
//***************灭火*********************//
voidfire()
{
unsignedintn;
while(chdata[3]<=0x7f||chdata[4]<=0x7f)
{
if(n>=1)revison();//
如果
1次吹不灭则调用修正
Set_IOA_Data(15,1);//
灭火风扇开启
delay_s(8);
Set_IOA_Data(15,0);//
灭火风扇关闭
delay_s(3);
n++;
}
sucessfire=1;
//1
灭火成功
workstate=0;
flag=0;
Set_IOB_Data(0,0);//
开启蜂鸣器报警
xp=255;
mm=0;
min=255;
}
//***************修正子程序*********************//
voidrevison()
{
forward(8,8);
adjust();
}
//***************voidadjust_s(void){
调整*********************//
if(min==chdata[1])turn_left(21);
if(min==chdata[2])turn_left(12);
if(min==chdata[3]&&abs(chdata[3]-chdata[4])>30)turn_left(5);
if(min==chdata[4]&&abs(chdata[3]-chdata[4])>30)turn_right(5);
if(min==chdata[5])turn_right(15);
if(min==chdata[6])turn_right(30);
}
voidadjust(void)
{
while(min<=0xc9)
{
if(min==chdata[1])
if(min==chdata[2])
{turn_left(21);delay_ms(20);}
{turn_left(5);delay_ms(20);}
if(min==chdata[3]&&abs(chdata[3]-chdata[4])>20
delay_ms(20);}
if(min==chdata[4]&&abs(chdata[3]-chdata[4])>20
delay_ms(20);}
if(min==chdata[3]&&abs(chdata[3]-chdata[4])<=20)break;
if(min==chdata[4]&&abs(chdata[3]-chdata[4])<=20)break;
){turn_left
(1);
){turn_right
(1);
if(min==chdata[5]){turn_right(5);delay_ms(20);}
if(min==chdata[6]){turn_right(30);delay_ms(20);}
}
}
//***************前进*********************//
voidforward(unsignedintm,unsignedintn)
{
pulse_x=0;
pulse_y=0;
while
(1)
{
if(pulse_x<=m&&pulse_y<=n){PWM_left(17,217);PWM_right(13,213);}if(pulse_x>m&&pulse_y<=n){PWM_right(13,213);}if(pulse_x<=m&&pulse_y>n){PWM_left(17,217);}
if(pulse_x>m&&pulse_y>n){pulse_x=0;pulse_y=0;break;}if(workstate==1&&flag==0){pulse_x=0;pulse_y=0;break;}
}
}
voidforward_s(unsignedintm,unsignedintn)
{
pulse_x=0;
pulse_y=0;
while
(1)
{
if(pulse_x<=m&&pulse_y<=n){PWM_left(17,417);PWM_right(13,413);}if(pulse_x>m&&pulse_y<=n){PWM_right(13,413);}if(pulse_x<=m&&pulse_y>n){PWM_left(17,417);}
if(pulse_x>m&&pulse_y>n){pulse_x=0;pulse_y=0;break;}if(workstate==1&&flag==0){pulse_x=0;pulse_y=0;break;}
}
}
voidforward_s2(unsignedintm,unsignedintn)
{
pulse_x=0;
pulse_y=0;
while
(1)
{
if(pulse_x<=m&&pulse_y<=n){PWM_left(15,215);PWM_right(15,215);}if(pulse_x>m&&pulse_y<=n){PWM_right(15,215);}if(pulse_x<=m&&pulse_y>n){PWM_left(15,215);}
if(pulse_x>m&&pulse_y>n){pulse_x=0;pulse_y=0;break;}if(workstate==1&&flag==0){pulse_x=0;pulse_y=0;break;}
}
}
//***************后退*********************//
voidbackward(unsignedintm,unsignedintn)
{
pulse_x=0;
pulse_y=0;
while
(1)
{
if(pulse_x<=m&&pulse_y<=n){PWM_left(13,213);PWM_right(17,217);}if(pulse_x>m&&pulse_y<=n){PWM_right(17,217);}
if(pulse_x<=m&&pulse_y>n){PWM_left(13,213);}
if(pulse_x>m&&pulse_y>n){pulse_x=0;pulse_y=0;break;}if(workstate==1&&flag==0){pulse_x=0;pulse_y=0;break;}
}
}
//***************左转*********************//
voidturn_left(unsignedintm)
{
pulse_x=0;
pulse_y=0;
while
(1)
{
if(pulse_x<=m&&pulse_y<=m){PWM_left(13,413);PWM_right(13,413);}if(pulse_x>m&&pulse_y<=m){PWM_right(13,413);}if(pulse_x<=m&&pulse_y>m){PWM_left(13,413);}
if(pulse_x>m&&pulse_y>m){pulse_x=0;pulse_y=0;break;}if(workstate==1&&flag==0){pulse_x=0;pulse_y=0;break;}
}
}
//***************右转*********************//
voidturn_right(unsignedintm)
{
pulse_x=0;
pulse_y=0;
while
(1)
{
if(pulse_x<=m&&pulse_y<=m){PWM_left(17,417);PWM_right(17,417);}if(pulse_x>m&&pulse_y<=m){PWM_right(17,417);}
if(pulse_x<=m&&pulse_y>m){PWM_left(17,417);}
if(pulse_x>m&&pulse_y>m){pulse_x=0;pulse_y=0;break;}if(workstate==1&&flag==0){pulse_x=0;pulse_y=0;break;}}
}
//***************
voidstop(void)
{
停止*********************//
*P_IOA_Data&=~(bit13+bit14);//
将IOA13、IOA14清
0
pulse_x=0;
pulse_y=0;
}
//***************控制小车左轮*********************//
voidPWM_left(unsignedinthigh_time,unsignedintcyclical_time)
{
if(left
<=high_time)
/*high_time
为脉冲的高电平时间,
cyclical_time
为脉冲周期时间
*/
Set_IOA_Data(14,1);//
将IOA14置
1
else
Set_IOA_Data(14,0);//
将IOA14清
0
if(left>cyclical_time)
{
left=0;
pulse_x++;
}
*P_Watchdog_Clear=0x0001;
}
//***************控制小车右轮*********************//
voidPWM_right(unsignedinthigh_time,unsignedintcyclical_time)
{
if(right<=high_time)
Set_IOA_Data(13,1);//
将IOA13置
1
else
Set_IOA_Data(13,0);//
将IOA13清
0
if(right>cyclical_time)
{
right=0;
pulse_y++;
}
*P_Watchdog_Clear=0x0001;
}
//*************


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 智能 灭火 机器人 设计 程序
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
年十佳微型小说.docx
-
江门高层次人才享受生活待遇暂行办法江门人力资源和社会保障局范本模板.docx
-
健身俱乐部管理的组织结构及布局.docx
-
环境因素识别与评价管理程序含表格 2.docx
-
幸福蓝海度财务分析报告.docx
-
计算机文化基础.docx
-
六年级创新语文综合提高卷二2.docx
-
届全国卷历史重大事件年表.docx
-
外研版八年级下册Module6 Unit2 基础知识点测试有答案.docx
-
教科版科学四年级上册学生活动手册59359演示教学.docx
-
教导主任竞聘演讲稿精选多篇.docx
-
火灾应急预案模板文档.docx
-
学前儿童心理学的对象及内容.docx
-
电子秤电路设计与制作.docx
-
届高考地理二轮复习训练专题二 大气运动规律.docx
-
汽车加油站里防雷设施设计.docx
-
网络入侵危害和必要性以及入侵检测应用案例.docx
-
卢思浩语录.docx
-
教案教学大纲二手车鉴定评估教案首页.docx
