 高稳定性抗干扰红外线反射传感器.docx
高稳定性抗干扰红外线反射传感器.docx
- 文档编号:10616055
- 上传时间:2023-02-21
- 格式:DOCX
- 页数:16
- 大小:489.02KB
高稳定性抗干扰红外线反射传感器.docx
《高稳定性抗干扰红外线反射传感器.docx》由会员分享,可在线阅读,更多相关《高稳定性抗干扰红外线反射传感器.docx(16页珍藏版)》请在冰豆网上搜索。
高稳定性抗干扰红外线反射传感器
高稳定性抗干扰红外线反射传感器
写于:
星期四26八月@08:
42:
58
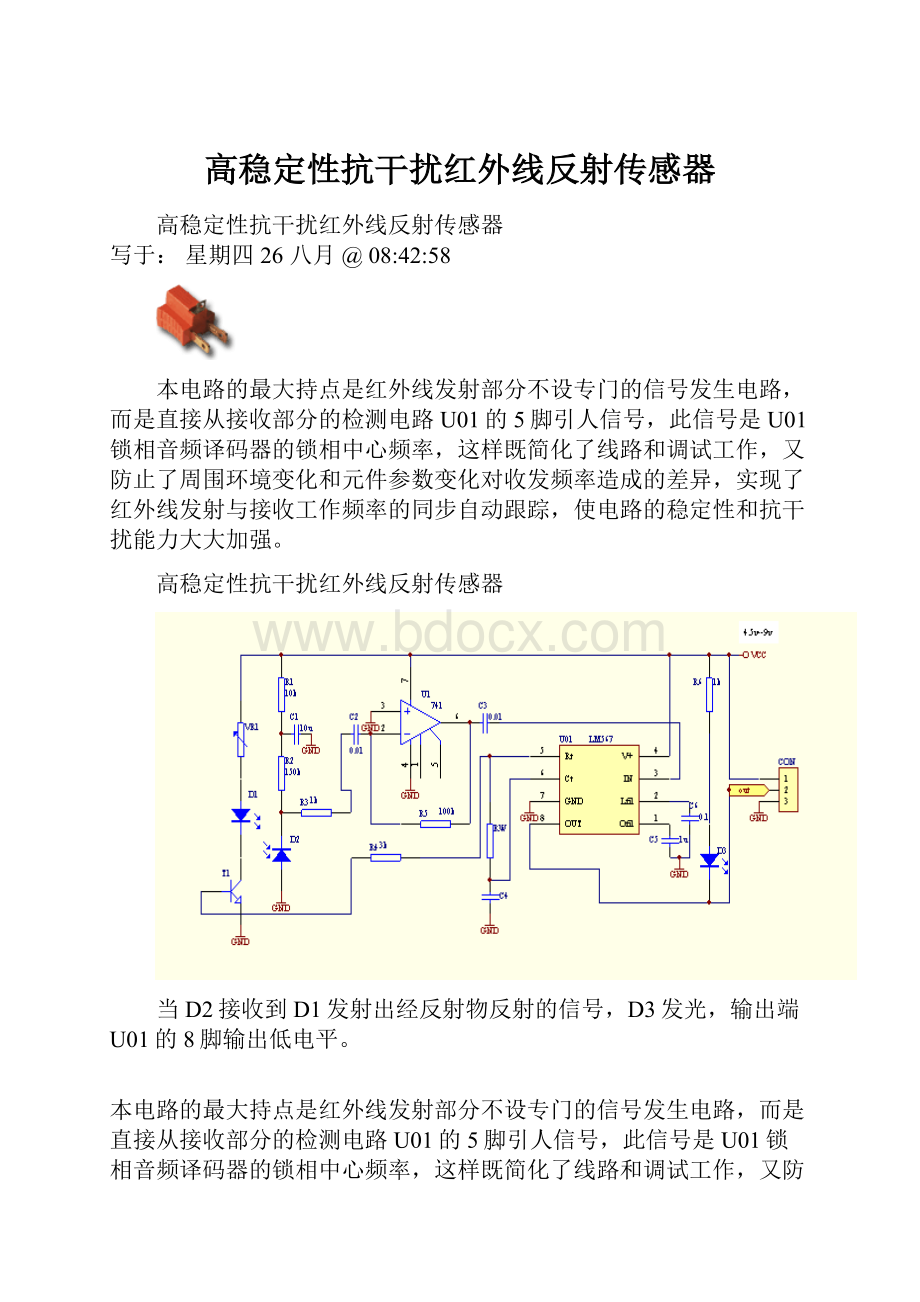
本电路的最大持点是红外线发射部分不设专门的信号发生电路,而是直接从接收部分的检测电路U01的5脚引人信号,此信号是U01锁相音频译码器的锁相中心频率,这样既简化了线路和调试工作,又防止了周围环境变化和元件参数变化对收发频率造成的差异,实现了红外线发射与接收工作频率的同步自动跟踪,使电路的稳定性和抗干扰能力大大加强。
高稳定性抗干扰红外线反射传感器
当D2接收到D1发射出经反射物反射的信号,D3发光,输出端U01的8脚输出低电平。
本电路的最大持点是红外线发射部分不设专门的信号发生电路,而是直接从接收部分的检测电路U01的5脚引人信号,此信号是U01锁相音频译码器的锁相中心频率,这样既简化了线路和调试工作,又防止了周围环境变化和元件参数变化对收发频率造成的差异,实现了红外线发射与接收工作频率的同步自动跟踪,使电路的稳定性和抗干扰能力大大加强。
本电路可多个用于同一设备而不会相互干扰,因为不同RW或C4的值U01译码器的中心频率不同,但中心频率不能大于500KHZ。
调整VR可改变探测距离,注意探测距离要受反射面颜色的影响,这是红外线的特性决定,寻迹机器人用了此特性。
我用本电路多个和单片机89C2051改装玩具遥控车做成了避障机器人、避悬机器人、寻迹机器人,效果很好。
而且寻迹机器人可寻多种颜色底(除黑色底外)的黑线或黑底的多种颜色线(除黑线外)。
我想还可做成沿墙边走机器人、跟踪机器人等,还可用于其它方面的自动控制中。
用于机器人装备的单片机控制全自动燃气炮
这是一个用普通打火机液化气爆燃发射BB弹的气炮,主要是根据初中物理的30%可燃气与70%空气混合点燃可发生爆炸的原理。
我想这种炮可用于机器人射击比赛上。
图片中我是1999年根据上述原理做的实验品,做工比较粗糙。
做的时候我也不知道在比较小的空间点燃能不能发生爆燃,就用纸的牙膏盒做实验,实验的差不多,才近一步做了这个作品。
现在庆典时用的礼炮好像也是用的这个原理。
这个作品是个坦克,不过我很喜欢机器人,我本打算把它作的像红警2里的美军自动机器人。
作品是用红外线摇控的,机身用的是奥迪公司出的摇控坦克,把气炮的机构都装进了重做的炮塔,原来的红外线摇控电路不够用了,重作的摇控电路,现在可以控制:
前、后、左、右、炮塔左转、炮塔右转、炮管上、炮管下、装弹、发射、大灯。
燃烧室是用塑料盒子做的,空气泵是用的给鱼缸加氧的,点火线圈是用的点液化气的电子点火器,市场上有卖的2-3元。
AT89C2051在这里有较大的作用,它控制整个工作过程:
1、2051控制空气泵给燃烧室加空气,同时排出了上次燃烧后的气体,时间为10秒左右。
2、2051控制装弹电机正转——装弹,同时打开了打火机放气开关,向燃烧室注入液化气,时间为4秒左右。
3、2051控制装弹电机反转——BB弹被推入炮管,同时关闭打火机放气开关。
4、按点火开关,点火电极放电,电火花点燃气体,开炮。
在晚间可看见蓝色火苗从炮口射出。
效果:
这个作品可以将BB弹射出10米,在2米处可以击穿2-3层报纸。
制作要点:
1、燃烧室要用塑料等热的不良导体来作,这样热能量损失小,功率大。
2、燃烧室材料要坚固,外面可以金属加固。
不要做的太大,后果我也不知道。
3、空气泵要用防止空气倒回的功能,防止气体泄露。
4、点火电极要放大燃烧室里中间的位置,效果好。
5、用单片机控制好加入空气和液化气的时间,也就是二种气体的混合比例,比例好,效果好,比例不好,是点不着的。
6、在炮管上可以加装激光灯,作为瞄准器。
这个作品的缺点:
1、开炮的成功率为70-80%,气体装入后短时间内不马上点燃,就点不着了,可能是主要有露气的地方。
2、开一次炮的时间较长,要15-20秒左右,主要是气体装入的太慢。
3、装弹数量比较少,只能装3个。
作品图片(点击图片可以看大图):
ALEI
2007.08.06
ALEI的另一个作品:
带语音识别的机器人——RT550V
步进电机的单片机控制
作者:
李通刘志垠
摘要:
本设计采用凌阳16位单片机SPCE061A对步进电机进行控制,通过IO口输出的具有时序的方波作为步进电机的控制信号,信号经过芯片L298N驱动步进电机;同时,用4X4的键盘来对电机的状态进行控制,并用数码管显示电机的转速,采用74LS164作为4位单个数码管的显示驱动,从单片机输入信号;利用凌阳单片机的语音功能播报电机的转速。
关键词:
步进电机单片机数码管
一、方案论证与比较
1、本设计的重点在于对步进电机的控制和驱动,设计中受控电机为四相六线制的步进电机(内阻33欧,步进1.8度,额定电压12V)
方案一:
使用多个功率放大器件驱动电机
通过使用不同的放大电路和不同参数的器件,可以达到不同的放大的要求,放大后能够得到较大的功率。
但是由于使用的是四相的步进电机,就需要对四路信号分别进行放大,由于放大电路很难做到完全一致,当电机的功率较大时运行起来会不稳定,而且电路的制作也比较复杂。
方案二:
使用L298N芯片驱动电机
L298N芯片可以驱动两个二相电机(如图1-1),也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。
图1-1
通过比较,使用L298N芯片充分发挥了它的功能,能稳定地驱动步进电机,且价格不高,故选用L298N驱动电机。
而使用L298N时,可以用L297来提供时序信号,可以节省单片机IO口的使用;也可以直接用单片机模拟出时序信号,由于控制并不复杂,故选用后者。
2、数码管显示电路的设计
方案一:
串行接法
设计中要显示4位数字,用74LS164作为显示驱动,其中带锁存,使用串行接法可以节约IO口资源,但要使用SIO,发送数据时容易控制。
方案二:
并行接法
使用并行接法时要对每个数码管用IO口单独输入数据,占用资源较多。
由于设计中用一块单片机进行控制,资源有限,选择了方案一。
另外,使用锁存也起到节约资源的作用。
二、步进电机控制原理
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
其基本原理作用如下:
(1)控制换相顺序
通电换相这一过程称为脉冲分配。
例如:
三相步进电机的三拍工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断。
(2)控制步进电机的转向
如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
(3)控制步进电机的速度
如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
三、理论设计
综和以上选取的方案,总的流程如图3-2所示。
图3-1
1、步进电机驱动电路
通过L298N构成步进电机的驱动电路,电路图如图3-2所示。
通过单片机SPCE061A的IOB8~IOB13对L298N的IN1~IN4口和ENA、ENB口发送方波脉冲信号,起时序图如图3-3所示。
图3-2
图3-3
2、数码管显示电路的设计
数码管的显示驱动使用74LS164,通过SPCE061A的IOB0和IOB1口对DATA和CLK发送数据。
图3-4
3、4x4键盘电路
在设计中,使用了标准的4x4键盘,其电路图如图3-5所示。
单片机的A口低8位为键盘的接口。
尽管设计要求中只需要4个键对步进电机的状态进行控制,但考虑到对控制功能的扩展,我们使用了4x4的键盘。
图3-5
四、程序设计
在进行程序设计的过程中,主要分为五个部分:
双机通讯、语音报数、数字显示、步进电机驱动、键盘;其中双机通讯的实现和语音报时比较有特点,将其流程简要介绍如下,其他部分见附的程序。
1、双机通讯
图4-1
我们在实现双机通讯的过程中使用了“三次握手”的方式,这是Intle网中成用的数据通讯确认协议,其流程图如图4-1所示。
2、语音报数
程序设计中语音报数使用的是SACM-A2000,考虑到程序比较简单,首先使用了自动报数方式,但发现不能进行连续报数,于是使用了非自动方式,流程图如图4-2所示。
图4-2
五、结果分析与总结
应该说这次课程设计还是基本达到了设计的要求,但是也存在着未能解决的问题,由于在执行语音程序时对资源的消耗比较大,在语音报数的时候会中断步进电机驱动信号的输出,导致电机停转。
为此,我们修改了方案,使用了两块单片机,通过双机通讯来传递信号,遗憾的是问题仍然没有得到解决。
这次步进电机的综合实验我们学到了步进电机、数码管、4*4键盘、语音报数和双机通讯的使用,更重要的是学会了程序出问题时调试的方法,并养成了Debug的习惯,学到了程序出问题后怎样去解决的基本方法。
参考文献:
[1]谢自美《电子线路设计、实验、测试(第二版)》[M]武汉:
华中理工大学出版社,2000.
[2]薛钧义,张彦斌,樊波等《凌阳十六位单片机原理及应用》[M]北京:
北京航空航天大学出版社,2003.
[EB/01].
[EB/02]
项目名称:
远程实验室机器人控制系统。
所谓的实验室机器人,呵呵其实就是一个搭了手提电脑的可移动机械臂,用手提电脑(学校的手提,不算钱)的缘故是我们想做无线控制,而用无线网卡对于我们来说最简单,还有就是方便做无线图象传输。
这个就是整个系统硬件上最重要的部分—手部动作采集支架,只用了很便宜的电位器作角度的感应,所以精度……呵呵,样子也有点简陋。
不过还是资金的问题,本来sugar说用几个陀螺仪的
控制系统的其他部分,包括一个游戏操纵杆,用于控制机器人的行走,另一台手提,用于无线网卡通讯,还有摄像头监视,数据采集的查看等。
终于见到一个lego的东西了:
RCX,用于数据采集的,具体是用VB做的,以后应该会把代码贴出来。
(似乎没用什么乐高的东西,呵呵,不过先发在这边,等全部发完再转移到机器人展示区)
_________________
希望有一天能见到真正的RX-78,呵呵
发表于:
SatSep11,20045:
07pm 发表主题:
[最新消息]西南科大机器人小组荣获亚太地区大学生机器人大赛亚军
在刚刚结束的亚太地区“鹊桥相会”大学生机器人大赛决赛中,西南科大机器人竞赛小组迎战越南队,比赛刚开始,双方呈焦灼态势,此后不久越南队阻挡机器人发挥了速度快、移位灵活多变的特点,占得先机,最终赢得冠军。
西南科大机器人小组荣获亚军。
此外,经大赛评委认真评定,西南科大机器人竞赛小组还被授予最佳技术奖!
下午3时55分,亚太地区“鹊桥相会”大学生机器人大赛颁奖典礼隆重举行。
有点遗憾啊~~
今天看到这个结果感到非常遗憾!
非常可惜!
意料之中,情理之外。
一定是人的问题!
(当然不一是老师)
西南科技大学的加工已经没有什么问题,关键是思路,zh,你让学生感觉太累了,robotgogo,明年做指导一定要考虑少做垃圾东西,例如去年的保底方案,今年的一个小礼物机器人等空想方案。
明年我在方案、网络舆论、有需要的话还可以拉到祖国论坛上很多朋友支持你,抛开那两个老师,你带队!
真正做学生自己的机器人!
希望两位老师激流勇退,把天空真正留给学生,学生不会比你们差。
张俐、吴健努力!
取代他们,但是千万不要学习他们以前的一些做法,否则……
。
两位老师,两年了,robotgogo已经很厉害了,以前和他的接触中我觉得他更能把握一些东西,如果你们退出,我们会改变对你们的印象,人毕竟是会改变的,我也代表学校保送中科大的部分学生,现在小组里的部分学生、祖国网友感谢你们。
周月,有空代我向黄老师表示问候,同时你也要感谢她,我知道有很多事情是她照顾你,但是你可能还不知道。
王娟,明年继续加入这个团队,要学精通一个东西,不能什么都学,学精通一个远比什么都学好。
如果明年他们因为你的烧伤问题而不要你做机器人,我会在全国各大论坛上公布很多真相以及发动网友进攻他们。
从另一个角度想,他们应该照顾你,有你在可能会令西科大更加光彩,可是他们没有这么想。
xky、小心、周兵、吕军、李科、李勇、白珊、李冬雪、继续努力!
我会支持你们,以后万一有困难我能帮忙的就找我。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 稳定性 抗干扰 红外线 反射 传感器
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
学年云南省西盟县佤族自治县九年级上学期期末考试物理卷Word文档下载推荐.docx
-
党委工作报告Word下载.docx
-
智慧园区建设建议Word下载.docx
-
执业药师中药专业知识一精华总结版Word格式.docx
-
高新节水工程监理实施细则Word下载.docx
-
高中数学 第一章 算法初步 11 算法与程序框图 111 算法的概念教学案 新人教A版必修3Word文件下载.docx
-
药店工作全面总结及详细计划Word下载.docx
-
一年级语文上册全册集体备课教案人教版文档格式.docx
-
危险品货物运输合同模板3篇最新篇Word文档下载推荐.docx
-
卫生器具给水配件安装文档格式.docx
-
低碳经济知识专刊Word下载.docx
-
第2章32 循环语句Word文档格式.docx
-
中国旅游产品市场分析 docWord格式文档下载.docx
-
高中学生化学奥林匹克竞赛预赛模拟试题及参考答案和评分标准Word格式文档下载.docx
-
医疗销售方式3Word格式文档下载.docx
-
我的未来不是梦演讲稿15篇Word文件下载.docx
-
个人就业计划书精选3篇Word文档格式.docx
-
第十三四章测试题Word文件下载.docx
-
中考化学专练实验探究物质的组成成分Word文档下载推荐.docx
