 实验三数字PID 控制器编程算法的实现.docx
实验三数字PID 控制器编程算法的实现.docx
- 文档编号:10473351
- 上传时间:2023-02-13
- 格式:DOCX
- 页数:16
- 大小:327.83KB
实验三数字PID 控制器编程算法的实现.docx
《实验三数字PID 控制器编程算法的实现.docx》由会员分享,可在线阅读,更多相关《实验三数字PID 控制器编程算法的实现.docx(16页珍藏版)》请在冰豆网上搜索。
实验三数字PID控制器编程算法的实现
AP0704225孙凯杰
实验三数字PID控制器编程算法的实现
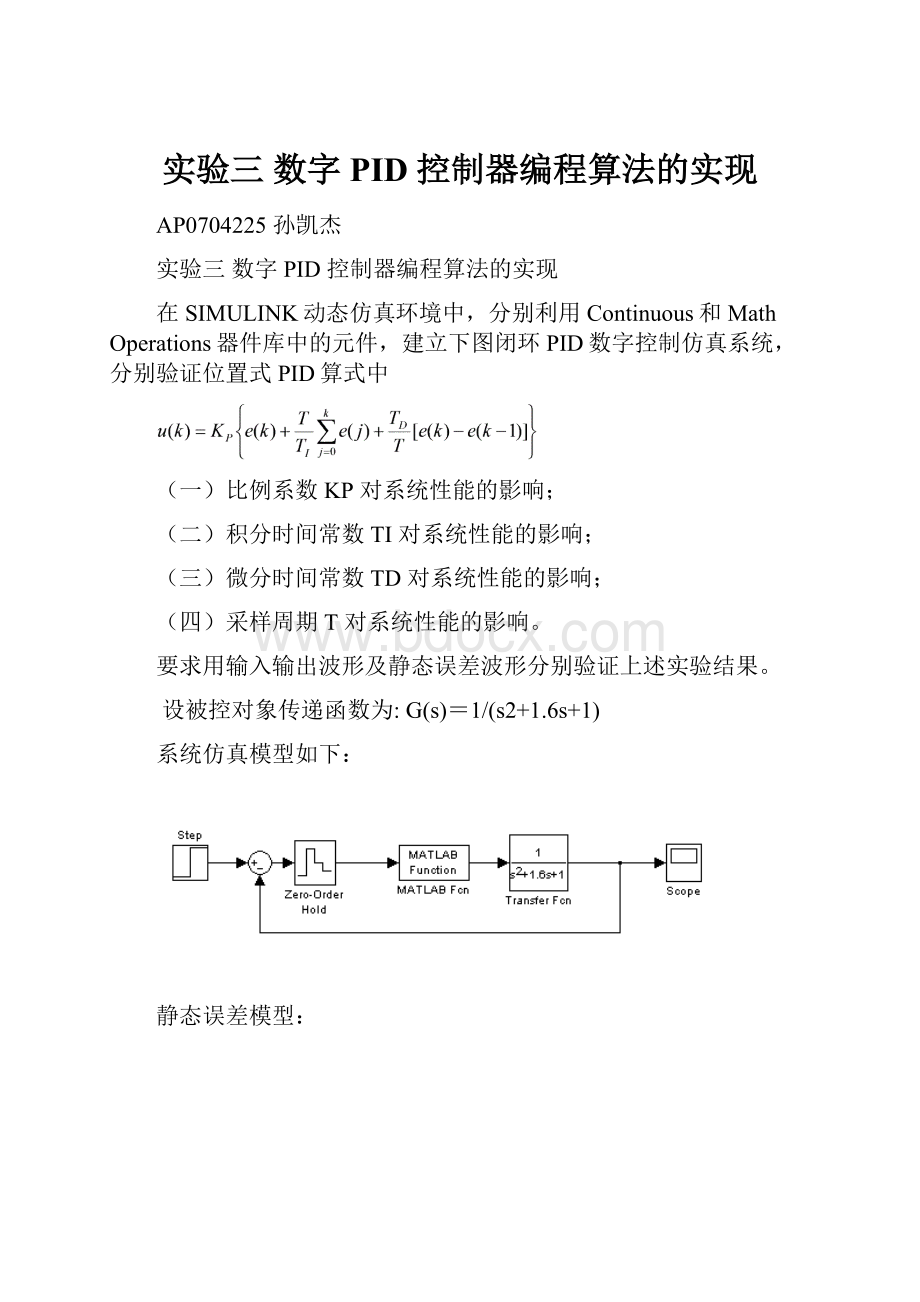
在SIMULINK动态仿真环境中,分别利用Continuous和MathOperations器件库中的元件,建立下图闭环PID数字控制仿真系统,分别验证位置式PID算式中
(一)比例系数KP对系统性能的影响;
(二)积分时间常数TI对系统性能的影响;
(三)微分时间常数TD对系统性能的影响;
(四)采样周期T对系统性能的影响。
要求用输入输出波形及静态误差波形分别验证上述实验结果。
设被控对象传递函数为:
G(s)=1/(s2+1.6s+1)
系统仿真模型如下:
静态误差模型:
系统程序程序如下:
functiony=DPID(x)
globalN
globalKp
globalT
globalTi
globalTd
globale
e(N)=x;
u=0;
fori=1:
N
u=u+e(i);
end
y=Kp*x+[(Kp*T)/Ti]*u+[(Kp*Td)/T]*[e(N)-e(N-1)];
fori=1:
N-1
e(i)=e(i+1);
end
初始化程序如下:
先取参数如下:
Kp=60N=100T=0.0001TD=0.2Ti=0.01
functiony=DPIDcsh
globalN
globalKp
globalT
globalTi
globalTd
globale
Kp=60
N=100
T=0.0001
Td=0.2
Ti=0.01
fori=1:
N-1
e(i)=0;
end
(一)分析比例系数KP对系统性能的影响:
取KP=60
图1输入信号
图2输出图形
图3静态误差图形
取KP=30:
图4输出波形
图5静态误差图形
取Kp=90
图6输出波形
图5静态误差图形
分析:
由上不同Kp值得到的仿真结果可知:
比例系数加KP大,使系统的动作灵敏,速度加快。
KP偏大,则振荡次数增加,调节时间加长。
KP太大,系统会趋于不稳定。
KP太小,又会使系统动作缓慢。
对稳态特性的影响
加大比例系数KP,在系统稳定的情况下,可以减少稳态误差ess,提高控制精度。
但加大KP只是能够减少稳态误差ess,不能完全消除稳态误差ess。
(二)分析积分时间常数TI对系统性能的影响:
取Ti=0.01
图6输出波形
图7静态误差图形
取Ti=0.1
图8输出波形
图9静态误差图形
取Ti=0.001
图10输出波形
图11静态误差图形
分析:
由上不同Ti值得到的仿真结果可知:
对动态特性的影响
TI太小时,系统将不稳定。
TI偏小,则系统振荡次数较多。
TI太大时,对系统性能的影响减少。
当TI合适时,过渡过程的特性则比较理想。
对稳态误差的影响
积分控制能消除系统的稳态误差ess,提高控制系统的控制精度。
但若TI太大时,积分作用太弱,以至不能减少稳态误差ess。
(三)分析微分时间常数TD对系统性能的影响:
取Td=0.2
图12输出波形
图13静态误差图形
取Td=1
图14输出波形
图15静态误差图形
取Td=10
图16输出波形
图17静态误差图形
分析:
由上不同Td值得到的仿真结果可知:
微分控制可以改善动态特性,如超调量减少,调节时间缩短,允许加大比例控制,使稳态误差减少,控制精度提高。
TD偏大时,超调量较大,调节时间较长。
TD偏小时,超调量也较大,调节时间也较长。
当TD合适时,可以得到比较满意的过渡过程。
(四)(四)分析采样周期T对系统性能的影响:
取T=0.0001
图18输出波形
图19静态误差图形
取T=0.001
图20输出波形
图21静态误差图形
取Td=0.00005
图22输出波形
图23静态误差图形
分析:
由上不同T值得到的仿真结果可知:
当T太大时,系统会不稳定,T较小时会有少许超调,当T适当时,误差基本为零,控制精度很高。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 实验三 数字PID 控制器编程算法的实现 实验 数字 PID 控制器 编程 算法 实现
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
二元一次方程组解法练习题精选(含答案).doc
-
好题牛顿第一定律同步练习题及答案学生版.doc
-
上海市浦东新区2018年九年级物理一模试题(WORD版).doc
-
初中生物实验探究题精题集锦.doc
-
八年级物理光的反射、平面镜成像及光的折射实验探究题.doc
-
初中化学实验报告单(上).doc
-
初一生物教学计划.doc
-
力和运动知识点总结.docx
-
初中物理如何看电路图练习.doc
-
随团队医出行健康医疗服务专业化服务机构创办商业计划书.docx
-
安徽省初中学业水平考试化学试题及答案解析.doc
-
八年级物理教学反思.docx
-
上海市黄浦区2017届九年级4月学业模拟考试(二模)化学试题.doc
-
初二物理--固体压强-精华版.doc
-
初中化学常见物质变质问题汇编-2017化学中考热点.doc
-
初三化学-易错题精选练习.doc
-
中考化学物质的性质和变化专题复习.docx
-
动与静优秀说课稿.doc
-
初中物理实验设计及答案.doc
