 卡西欧4800计算器测量放样程序汇编.docx
卡西欧4800计算器测量放样程序汇编.docx
- 文档编号:10444352
- 上传时间:2023-02-11
- 格式:DOCX
- 页数:23
- 大小:39.81KB
卡西欧4800计算器测量放样程序汇编.docx
《卡西欧4800计算器测量放样程序汇编.docx》由会员分享,可在线阅读,更多相关《卡西欧4800计算器测量放样程序汇编.docx(23页珍藏版)》请在冰豆网上搜索。
卡西欧4800计算器测量放样程序汇编
卡西欧4800计算器测量放样程序汇编
4800程序使用说明书
程序代码
术语:
连续曲线数据块、独立曲线数据块、长短链
功能:
1、 放样对应里程中心点
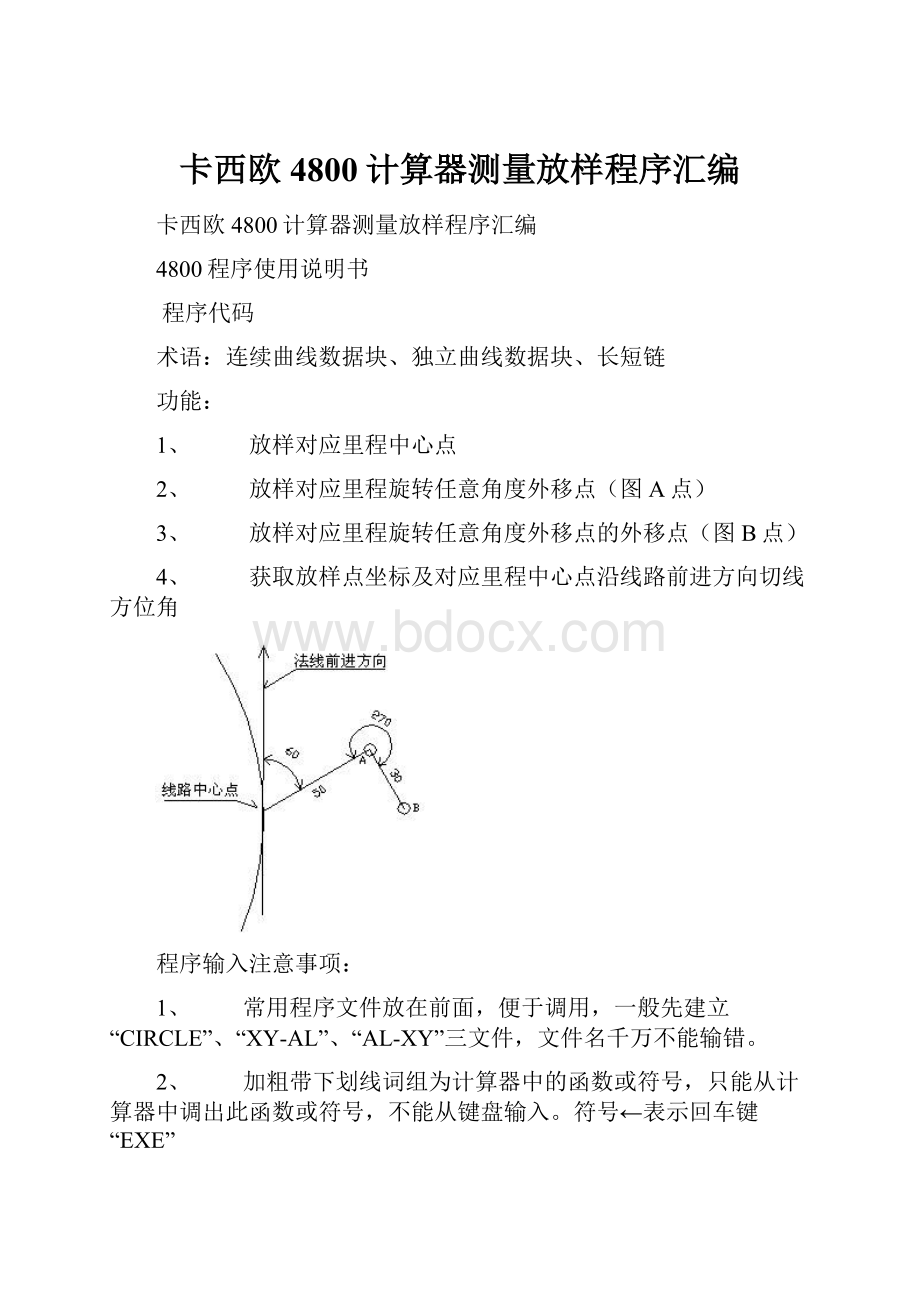
2、 放样对应里程旋转任意角度外移点(图A点)
3、 放样对应里程旋转任意角度外移点的外移点(图B点)
4、 获取放样点坐标及对应里程中心点沿线路前进方向切线方位角
程序输入注意事项:
1、 常用程序文件放在前面,便于调用,一般先建立“CIRCLE”、“XY-AL”、“AL-XY”三文件,文件名千万不能输错。
2、 加粗带下划线词组为计算器中的函数或符号,只能从计算器中调出此函数或符号,不能从键盘输入。
符号←表示回车键“EXE”
坐标输入通用格式:
屏幕显示OPPNAME?
(置镜点名称)或CPPNAME?
(后视点名称):
1:
输入-1:
手动输入坐标X,Y
2:
输入大于1数字:
输入用数字所代表的控制点名。
如数据库中没有本数字所代表的点名,则系统显示SynERRORin…(文件名)。
曲线放样程序(CIRCLE)运行说明:
步骤1:
屏幕提示“LOAD?
”(输入曲线要素)
1.1:
输入1(默认):
输入里程后将自动判断所在曲线并调用(此功能必须保证曲线数据库中有连续曲线数据块,具体详见数据库建立)。
1.2:
输入-1:
屏幕提示手动输入各曲线要素,ZJ(转角)、R(半径)、L0(缓和曲线长)、ZHKM(直缓里程)、JDX(曲线交点X坐标)、JDY(曲线交点Y坐标)、A0(起始直线边前进方向方位角)、1R,-1L(右偏输入1,左偏输入-1)。
1.3:
输入大于1的数字:
输入用数字代表的曲线名称,比如13,表示放样点位于曲线13上(曲线名称在建立数据库是自己命名,但一定要大于1)。
如库中没有此名称,系统显示“SynERRORinCIRCLE”。
(此功能必须保证曲线数据库中有独立曲线数据块)
步骤2:
屏幕提示“OPPNAME?
”(输入置镜点名称)
详见坐标输入格式。
步骤3:
屏幕提示“DK+M?
”(输入放样点对应中心里程)
如K15+002.35应输入15002.35。
但本次所输里程公里数与上次相同,可省去公里数,如再输入K15+800,只用输入800即可。
步骤4:
屏幕提示“OUTL”(放样到线路中线长度)
输入外移点相对于中心距离,有以下几种模式:
4.1:
输入零(默认),表示放样中线点。
4.2:
输入正值,如50,表示外移点距此里程中心50米。
如左图A点。
4.2.1屏幕提示“OUTANGLE?
”(外移点角度)
输入角度值是以线路中心为基点,线路前进方向(沿切线)为零方向,顺时针旋转到外移点时角度。
如左图放样A点输入角度值为60度。
4.3:
输入负值:
放样外移点的护桩。
如左图放样外移点A的护桩点B.输入A点句中心距离-50后,将进行以下步骤:
4.3.1屏幕提示:
“OUTANGLE1?
”
输入A点角度60,角度意义同步骤4.2.1。
4.3.2屏幕提示:
“OUTL2?
”
输入护桩点B距A点距离30。
4.3.3屏幕提示:
“OUTANGLE2?
”
输入角度270是以A点为基点,A点与线路中心连线为起始方向,顺时针旋转至护桩点B的角度。
(如上图所示)
步骤5:
屏幕显示L=…(平距)、A=…(方位角)。
步骤6:
屏幕提示:
“VIEWXY?
”(是否察看放样点坐标及线路中心切线方位角)
6.1:
输入-1(默认)不显示,程序将重复步骤3。
6.2:
输入1,屏幕显示放样点坐标X、Y、切线沿前进方向方位角P。
然后重复步骤3
步骤7:
按“AC/ON”键退出。
坐标反算程序(XY-AL)运行说明:
步骤1:
屏幕显示“OPPNAME?
”(输入置镜点坐标,具体见通用方法)。
步骤2:
屏幕显示“CPPNAME?
”(输入后视点坐标,具体见通用方法)。
步骤3:
屏幕显示平距L及方位角A,重复步骤2。
直至按“AC/ON”键退出
导线计算程序(AL-XY)运行说明:
步骤1:
屏幕显示第一行:
1:
X0,Y0-A0。
第二行:
2:
X0,Y0-XC,YC?
(表示选择导线的已知条件)
1.1:
输入1屏幕提示输入置镜点(OPP)坐标及已知后视方位角(A0)---置镜点指向后视点方位角
1.2:
输入2屏幕提示输入置镜点(OPP)及后视点(CPP)坐标。
步骤2:
屏幕显示“LEFTANGLE?
”
输入导线左角。
步骤3:
屏幕显示DISTANCE?
输入平距。
步骤4:
屏幕显示导线点坐标X及坐标Y。
后重复步骤二,直至按“AC/ON”键退出。
数据库建立
一、
曲线要素数据库:
1、 库文件名为:
“CIRDAT”(R与D中间有一空格)共占7个位置。
2、 线要素数据库中各字母含义如下:
A—转向角:
B—半径:
C—缓和曲线长:
D—直缓里程:
E—交点坐标X:
F—交点坐标Y:
G—直缓边前进方向方位角:
H—曲线偏移方向,右偏输入1,左偏输入-
3、库的组成部分:
库中包含两个模块,第一模块(第一行阴影和第二行阴影之间)为连续曲线数据块,优点是不用自己判断放样点所在曲线及在曲线还是在直线上,但条件是块中所有曲线里程必须连续且各曲线及夹直线之间无长短链,一般适合无长短链的高速公路上。
第二种模块(第三行阴影和第四行阴影之间)独立曲线数据块为通用模块,但是计算时必须输入放样点所在曲线名称。
建立数据库时程序表中阴影部分(共有四行)必须存在。
原理如下:
“CIRCLE”程序运行后出现屏幕提示“LOAD?
”时,如果输入1,则程序将根据所输里程从第一模块中找到所在曲线,并自动调用所在曲线要素。
如果输入曲线名称(大于一的数字)则程序在第二模块中调用与此名称相符曲线要素。
注意:
两种模块可以同时并存,最安全办法只用第二模块,把每个曲线命一个数字名称(数字必须大于一),模块具体格式见后。
第一模块格式(第一行阴影和第二行阴影之间)分两部分:
1、除最后一个曲子外输入格式:
Z≤193421.528(缓直里程)=>A=16°45°32°(转向角):
B=6000(半径):
C=320(缓和曲线长):
D=191120.522(直缓里程):
E=150(曲线交点坐标X):
F=0(曲线交点坐标Y):
G=141°12°21°(起始直缓边沿前进方向方位角):
H=1(表示曲线右偏,左偏输入-1):
GOTO1:
。
←
每一曲线形成一句,曲线按里程顺序从小到大排列。
2、最后一个曲线格式如下:
A=…:
B=…:
~:
H=…←
第二模块(第三行阴影和第四行阴影之间)格式:
W=71(曲线名称)=>A=…:
B=…:
~:
H=…:
←
每一曲线形成一句。
对顺序不做要求
曲线数字名称最好按一定规则命名,比如铁路第一个汉语拼音字母为T,类似于数字7,就把铁路曲线JD1、JD2、JD3命名为71、72、73。
调用时输入子曲线名称即可,注意曲线名称必须大于1
二、控制点坐标数据库
1、 文件名为:
“CONDAT”,共7个字符(N与D之间有一空格)
2、 第一句格式为:
U=4.444
3、
中间部分为:
Q=15(点名)=>U=144.456(坐标X):
V=234.567(坐标Y):
←
4、 控制点命名也要按一定规则,要便于记忆
错误分析:
1、 运行“CIRCLE”程序,系统显示“SynERRORinCIRCLE”
①、“CIRDAT”数据库中没有连续曲线数据块,“LOAD?
”出现后输入1
②、“CIRDAT”数据库中没有独立曲线数据块,“LOAD?
”出现后输入大于1的数字
③、“LOAD?
”出现后,输入曲线名称错误
④、输入曲线偏移方向时错误,既不等于1也不等于-1。
2、 运行“XY—AL(AL—XY)”程序,系统显示“SynERRORinXY—AL(AL—XY)”
①、 置镜点名称输入错误
②、 后视点名称输入错误
3、 运行“XY—AL(AL—XY)”程序,系统显示“MaERRORinXY—AL(AL—XY)”
①、置镜点与后视点名字输入相同
CasioFx-4800P计算器测量计算程序
抚顺市市政建设(集团)有限公司第一工程处:
张和光
CasioFx-4800P
一、整机概况
Fx-4800P计算器是日本Casio公司的产品,它除了具备函数型计算器的全部功能之外,还具备如下特殊功能:
1、二进制和八进制字组显示;
2、二进制、八进制、十进制和十六进制的转换和加、减、乘、除运算。
3、进行f(x)函数的输入与积分的计算;
4、进行标准差和回归计算。
Fx-4800P计算器具有同时显示运算表达式和计算结果的四行式显示的特点。
该计算器具有记存4500个程序步的记忆储存装置,计算器储存了程序之后,只要您输入数据,再按一下EXE键,计算器就会用数据进行程序执行,对于随数据而变化的反复计算的运用十分方便。
Fx-4800P计算器具备条件指令转移和非条件指令转移的能力,还具备逻辑判断能力,因此它可以进行测量工作中比较复杂的计算,当然其它专业的计算工作也同样可以解决。
(1)
Fx-4800P计算器操作方法比较简单、易学,程序编排灵活、易懂,可称之谓各专业技术人员的物美、价廉、得心应手的计算工具。
每一台Fx-4800P计算器都具备一本说明书,该计算器各部键的功能以及操作方法,只要认真按照说明书各章节学习,很快就能掌握和运用,现将我在生产实践中应用的部分计算程序介绍给测绘界的同行以便共同探讨。
二、程序库
1. 坐标反算:
程序步骤:
C”X1”:
D”Y1”:
E”X2”:
F”Y2”:
Fixm:
Pol(E-C,F-D:
I”S1-2=”◢
J≤O=>J=J+360△J”A1-2=”
操作过程:
ZBFS→EXE→输入X1值→EXE→输入Y1值→EXE→输入X2值→EXE→Y2→EXE→EXE→EXE
S1-2:
计算得出的距离;
A1-2:
计算得出的角度。
(按shift°′″转换为60进制的角度)
注:
此程序可循环计算。
2. 坐标正算:
程序步骤:
C”X1”:
D”Y1”:
S”S1-2”:
R”A1-2”:
Fixm:
X”X2”=C+Rec(S,R◢
Y”Y2”=D+J
操作过程:
ZBZS→EXE→输入X1值→EXE→输入Y1值→EXE→输入S1-2距离→EXE→输入A1-2角度(例125°31′23.25″)→EXE→EXE
注:
此程序可循环计算。
3. 缓和曲线曲线要素:
程序步骤:
B=0°1718.87′﹡L/R◢
X=L-L^3/40/R2◢
Y=L2/6/R◢
P=Y-R(1-cosB◢
Q=X-RsinB◢
T=(R+P)tan(A/2)+Q◢
E=(R+P)(cos(A/2))-1-R◢
Z=R(A-2B)л/180+2L◢
J=2T-Z◢
D=X-Y/tanB
操作过程:
HQQXYS→EXE→输入L值(即缓和曲线总长)→EXE→输入R值(即圆曲线半径)→EXE→得β角度→EXE→得Xh值→EXE→得Yh值→EXE→得P值→EXE→得Q值→EXE→输入A角(例125°31′23.25″)→EXE→得T值→EXE→得E值→EXE→得Z值→EXE→得J值→EXE→得D值
注:
此程序可循环计算。
4. 缓和曲线支距法:
程序步骤:
X=L-L^5/40/R2/Z2◢
Y=L^3/6/R/Z
操作过程:
HQZJF→EXE→输入L值(即缓和曲线段内任一点桩号到ZH点的距离)→EXE→输入R值(即圆曲线半径)→EXE→输入Z值(即缓和曲线总长)→EXE→得Xh值→EXE→得Yh值
注:
此程序可循环计算。
提示:
此程序不能用桩号直接输入是一个缺点,希望各位朋友多多指教。
5. 缓和曲线偏角法:
程序步骤:
A=0°572.9578′﹡L2/R/Z
操作过程:
HQPJF→EXE→输入L值(即缓和曲线段内任一点桩号到ZH点的距离)→EXE→输入R值(即圆曲线半径)→EXE→输入Z值(即缓和曲线总长)→EXE→求得A值(即是偏角值)按shift°′″转换为60进制的数值。
注:
此程序可循环运行。
提示:
此程序不能用桩号直接输入是一个缺点,希望各位朋友多多指教。
6. 圆曲线曲线要素:
程序步骤:
L=R﹡A﹡л/180◢
T=R﹡tan(A/2◢
E=R((cos(A/2))-1-1
操作过程:
YQXQXYS→EXE→输入R值(即圆曲线半径)→EXE→输入A值(即圆曲线A角,例125°31′23.25″)→EXE→求得L值→EXE→求得T值→EXE→求得E值
注:
此程序可循环运行。
7. 圆曲线偏角法:
程序步骤:
A=(D-X)﹡90/R/л
操作过程:
YQXPJF→EXE→输入D值(即圆曲线段任一点桩号)→EXE→输入X值(即ZY点桩号)→EXE→输入R值(即圆曲线半径)→EXE→求得A角(即圆曲线段任一点桩号的偏角,按shift°′″转换为60进制的角度。
注:
此程序可循环计算。
由于CasioFx-4800P计算器具有临时储存的功能,因此在输入其中数据时只须稍稍改动一下即可快捷、方便地进行计算了,既节省了时间、又准确,应该说这个功能是这种CasioFx-4800P计算器的一大优点。
8. 竖曲线主点要素:
程序步骤:
L=R*(A-B)◢
T=1›2*L◢
E=L2/8R
操作过程:
SQXZDYS→EXE→输入R值(即竖曲线半径)→EXE→输入A值→EXE→输入B值→EXE→得出L值(即弧度)→EXE→得T值(即切线长)→EXE→得E值(即外距)
注:
此程序可循环计算。
9.圆曲线加点坐标:
程序步骤:
A=(D-Z)*90/R/л◢
C=2*R*sinA◢
I=B+A◢
X=C*cosI+S◢
Y=C*sinI+V
操作过程:
YQXJDZB→EXE→输入D值(即圆曲线段内任一点桩号)→EXE→输入Z值(即ZY点桩号)→EXE→输入R值(即圆曲线半径)→EXE→得出A值(即圆曲线任一点桩号至ZY点的偏角值)→EXE→得出C值(即圆曲线任一点桩号至ZY点的弦长)→EXE→输入B值(即ZY到交点的方位角)→EXE→得出I值(即B值+A值的和)→EXE→输入S值(即圆曲线ZY点X1坐标)→EXE→得出X值(即圆曲线段任一点桩号的X坐标)→EXE→输入V值(即圆曲线ZY点Y1坐标)→EXE→得出Y值(即圆曲线段任一点桩号的Y坐标)
注:
此程序可循环计算。
Fx-3600pv计算器测量计算程序
目录
一、整机概况----------------------------第2页
二、程序库-------------------------------第4页
1、坐标反算-----------------------------第4页
2、坐标正算-----------------------------第5页
3、圆曲线曲线要素计算--------------第6页
4、圆曲线偏角法计算-----------------第7页
5、缓和曲线终点支距计算-----------第8页
6、缓和曲线段内任一辅点测设的方法
(1)切线支距法-----------------------第9页
(2)偏角法----------------------------第10页
7、竖曲线加点高程计算-------------第11页
三、结束语-----------------------------第12页
Fx-3600pv整机概况
Fx-3600pv计算器是日本CASIO公司的产品,它除了具备函数型计算器的全部功能之外,还具备如下特殊功能:
1、二进制和八进制字组显示;
2、二进制、八进制、十进制和十六进制的转换和加、减、乘、除运算。
3、进行f(x)函数的输入与积分的计算;
4、进行标准差和回归计算。
Fx-3600pv计算器具有记存38个程序步的记忆储存装置。
另外还可记存二个程序设计的程序至记忆装置内。
要将程序(数学程序)记存入计算器内时,只要在LRN状态(按MODEEXP键)执行一次正常的(即手动的)计算即可。
计算器记存了程序之后,现在您只要输入数据,再按一下RUN键,计算器就会用数据进行程序执行。
对于随数据而变化的反复计算的运用十分方便。
Fx-3600pv计算器具备条件指令转移和非条件指令转移的能力,还具备逻辑判断能力。
因此它可以进行测量工作中比较
(2)
复杂的计算。
当然其它专业的计算工作也同样可以解决。
Fx-3600pv计算器操作方法比较简单,易学,程序编排灵活,易懂,可称之谓各专业技术人员的物美、价廉、得心应手的计算工具。
二、测量计算程序
每一台Fx-3600pv计算器都具备一本说明书,该计算器各部键的功能以及操作方法,只要认真按照说明书各章节学习,很快就能掌握和运用。
现将我在生产实践中应用的部分计算程序介绍给测绘界的同行以便共同探讨。
二、程序库
1、程序名称:
坐标反算
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
ENTkin1ENT1kin2ENTkin-1ENTkin-2kout1ShiftR-Pkout2=ShiftHLTShiftX<—>YShift°′″
MODE。
操作方法:
P1(或P2)X2→RUN→Y2→RUN→X1→RUN→Y1→RUN(得D值)→RUN(得α值)(α为负角时+360°)
2、程序名称:
坐标正算:
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
ENTkin1ENTkin2ENTShiftP-RENT=kin+1SHIFTX<—>Ykin+2kout1ShiftHLTkout2ShiftRTN
MODE。
操作方法:
P1(或P2)X1→RUN→Y1→RUN→D→RUN→α→RUN(得X2)→RUN(得Y2)
注:
X1、Y1是已知导线点的坐标,即支仪器的位置。
3、程序名称:
圆曲线曲线要素计算:
L=л/180°*α*R
T=R*tgα/2
E=CSE(α/2-1)*R
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
ENT1kin1*ENT1kin2*л/180=ShiftHLT
kout1/2=tg*kout2=ShiftHLT
kout1/2=CosShift1/X-1=*kout2=
MODE。
操作方法:
P1(或P2)α(输入圆曲线α角)→RUN→R(输入圆曲线半径)→RUN(得L值)→RUN(得T值)→RUN(得E值)
4、程序名称:
圆曲线偏角法:
L*180°/2Rл
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
ENT-kout1=*90/kout2/л=ShiftRTN
MODE。
操作方法:
小桩号kin1
Rkin2(在编程之前,事先存入半径值)
P1(或P2)加桩号(输入圆曲线段内任一点桩号)→RUN(得圆曲线段内相应桩号的角度值)→Shift°′″(转换为角度)
5、程序名称:
缓和曲线终点支距计算:
Yh=Lh2/6R
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
ENTShiftX2/6/ENT1=
MODE。
操作方法:
P1(或P2)Lh(输入缓和曲线总长)→RUN→R(输入圆曲线半径)→RUN(得缓和曲线终点支距)
6、缓和曲线段内任一辅点测设的方法:
(1) 切线支距法:
(Lp/Lh)3*Yh=L3/6LhR
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
ENTXy3=/6/ENT1/ENT1=ShiftRTN
MODE。
操作方法:
P1(或P2)Lp(输入缓和曲线段内任意一点桩号至ZH点桩号的距离)→RUN→Lh(输入缓和曲线总长)→RUN→R(输入圆曲线半径)→RUN(得缓和曲线段内相应桩号支距)
(2)缓和曲线偏角法:
0°572.9578″*Lp2/RLh
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
0°572.9578″*ENTShiftX2/ENT1/ENT=
MODE。
操作方法:
P1(或P2)Lp(输入缓和曲线段内任意一点桩号至ZH点桩号的距离)→RUN→R(输入圆曲线半径)→RUN→Lh(输入缓和曲线总长)→RUN→Shift°′″
7、程序名称:
竖曲线加点高程计算:
程序步骤:
MODE4(D)
MODEEXPP1(或P2)
ENT-ENT=kin1*ENT+ENT+kout1ShiftX2/2/ENT1=ShiftRTN
MODE。
.
注意:
坡度有正负,凸曲线半径输入负值(-Y)
凹..................…..正值(-Y)
操作方法:
P1(或P2)大桩号→RUN→小桩号→RUN→坡度→RUN→起点高程→RUN→半径→RUN(得竖曲线段任意加点的高程)
三、结束语
以上程序可以输入Fx-3600pv计算器内,只要程序容量允许。
以上程序均用于实际计算工作当中,结果可靠,操作简单。
此外,该计算器还可进
金鹰商城超高层建筑垂直测控技术
仓恒芳丁勇冠黄祥春谢汉清
金鹰商城地处南京市最繁华的新街口闹市区,占地1.17ha,基地南北长145m,东西宽124m,建筑面积14.4万m2,主楼60层(地下2层,地上58层),高214.000m,为现浇钢筋混凝土筒中筒结构;裙楼8层,高36.000m,结构型式为框架-剪力墙结构。
该建筑物是目前国内较高的钢筋混凝土超高层建筑之一,也是南京市的标志性建筑物。
1 测量控制系统的建立
金鹰商城超高层施工测量控制系统主要分为平面测量控制、标高测量控制和垂直测量控制三大项目。
其中平面测量控制采用经纬仪控制轴线和形心位置,并用经纬仪分角和钢尺丈量的方法与极坐标法进行平面定位放样;标高测量控制采用水准仪控制起始标高位置,准确地测设各层的标高;而垂直测量控制则比一般工程复杂,主要使用激光测量仪和经纬仪,是该工程测量工作的重点和难点。
本文重点叙述垂直测量控制网的建立和测设。
2 垂直控制网的布设
由于本工程主楼高214.000m,其垂直精度的控制尤为重要。
施工到±0.000后,随结构升高,须将首层轴线逐层向上投测,作为各层放线和结构竖向控制的依据,其中,主楼轴线的投测更为重要。
为此,本工程采用激光测量仪。
本工程还建立了精度较高的控制系统,进行建筑物控制点的投测。
本工程东、北两面分别为道路,南西面紧邻多层、高层建筑物及大片民居,故在主楼内部设内控点进行投点,利用临近建筑物上设置的外控测量点进行校核。
本工程平面呈菱形,根据施工需要分两个流水段(南筒与北筒),根据主楼上述特点,在主楼地下室-10.400m标高处先设立5个内控点,拟以测绘院提供的“轴中”为中心点O,


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 卡西欧 4800 计算器 测量 程序 汇编
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《JAVA编程基础》课程标准软件16级.docx
《JAVA编程基础》课程标准软件16级.docx
-
《分数的初步认识》.docx
-
《金属钠的性质与应用》教学设计.docx
-
《蚕妇》.docx
-
《会计》教材Word版第14章非货币性资产交换.docx
-
《与朱元思书》教学案例及反思.docx
-
《小壁虎借尾巴 》教案.docx
-
1第一部分 辅导员岗位基本知识.docx
-
09年CFO复习题.docx
-
2G1计算书.docx
-
17 古诗五首夜雨寄北一等奖教案.docx
-
240T15mw机组整体启动方案解析.docx
-
485总线设计方案加上位机扩展.docx
-
Aspose Word模板使用总结.docx
-
CDMA掉话分析.docx
-
C++新闻信息管理系统.docx
-
《HSE管理体系的策划与运行》.docx
-
c语言改错题及答案.docx
-
CMS7000使用说明资料.docx
-
《财经法规与会计职业道德》模拟卷考试试题及答案资料.docx
-
《大众传播媒介的更新》教案2.docx
-
《教育知识与能力》中学版全国教师资格考试复习资料教学教材.docx
-
EPC施工组织设计1.docx
-
ERP在服装行业的信息化应用可行性研究报告.docx
-
《项羽之死》教案人教版高二选修教学设计.docx
-
《公共关系实务》总复习资料.docx
-
FLUKE744过程校准仪经典实例免费给大家会让你未来的道路更通达.docx
-
《护士条例》试题.docx
-
2F男鞋统装规范84.docx
-
4测试用例修复方法与工具.docx
-
MC尼龙轮项目可行性研究报告.docx
-
Weblogic Server系统管理手册.docx
-
XX品牌橱饰红星美凯龙商城店区域市场营销推广策划书Word下载.docx
-
江西上饶扩建年产三万吨铅银冶炼工程项目可行性研究报告文档格式.docx
-
分数乘法精品练习题2Word文件下载.docx
-
购物狂欢嘉年华策划提案Word格式.docx
-
最终版两区划定数据库规范方案送审稿Word文档下载推荐.docx
-
搬运机械手设计文档格式.docx
-
120个文言实词用法巧记Word格式.docx
-
海南省中考化学试题评卷小结1524题Word文档格式.docx
-
XX珲春河大桥工程建设项目可行性研究报告Word下载.docx
-
环保节能混合电动城市公交客车生产项目可行性研究报告Word文件下载.docx
-
白塔中学项目可行性研究报告Word文档下载推荐.docx
-
产权式度假酒店可行性研究报告Word文档格式.docx
-
彩印瓦楞纸箱生产项目可行性研究报告Word文件下载.docx
-
计算机三级考试信息管理复习笔记Word文件下载.docx
-
高考语文冲刺仿真模拟卷二Word下载.docx
-
人教版小学二年级数学下册第三单元 图形的运动一教案Word文档格式.docx
-
三年级语文下册练习五备课Word格式文档下载.docx
-
视频安防监控系统技术要求GAWord格式.docx
-
钛白粉行业分析报告Word格式.docx
