 控制系统的校正.docx
控制系统的校正.docx
- 文档编号:10311189
- 上传时间:2023-02-10
- 格式:DOCX
- 页数:13
- 大小:1.80MB
控制系统的校正.docx
《控制系统的校正.docx》由会员分享,可在线阅读,更多相关《控制系统的校正.docx(13页珍藏版)》请在冰豆网上搜索。
控制系统的校正
基于MATLAB控制系统的校正设计
1实验目的
1掌握串联校正环节对系统稳定性的影响。
2了解使用SISO系统设计工具(SISODesignTool)进行系统设计。
2设计任务
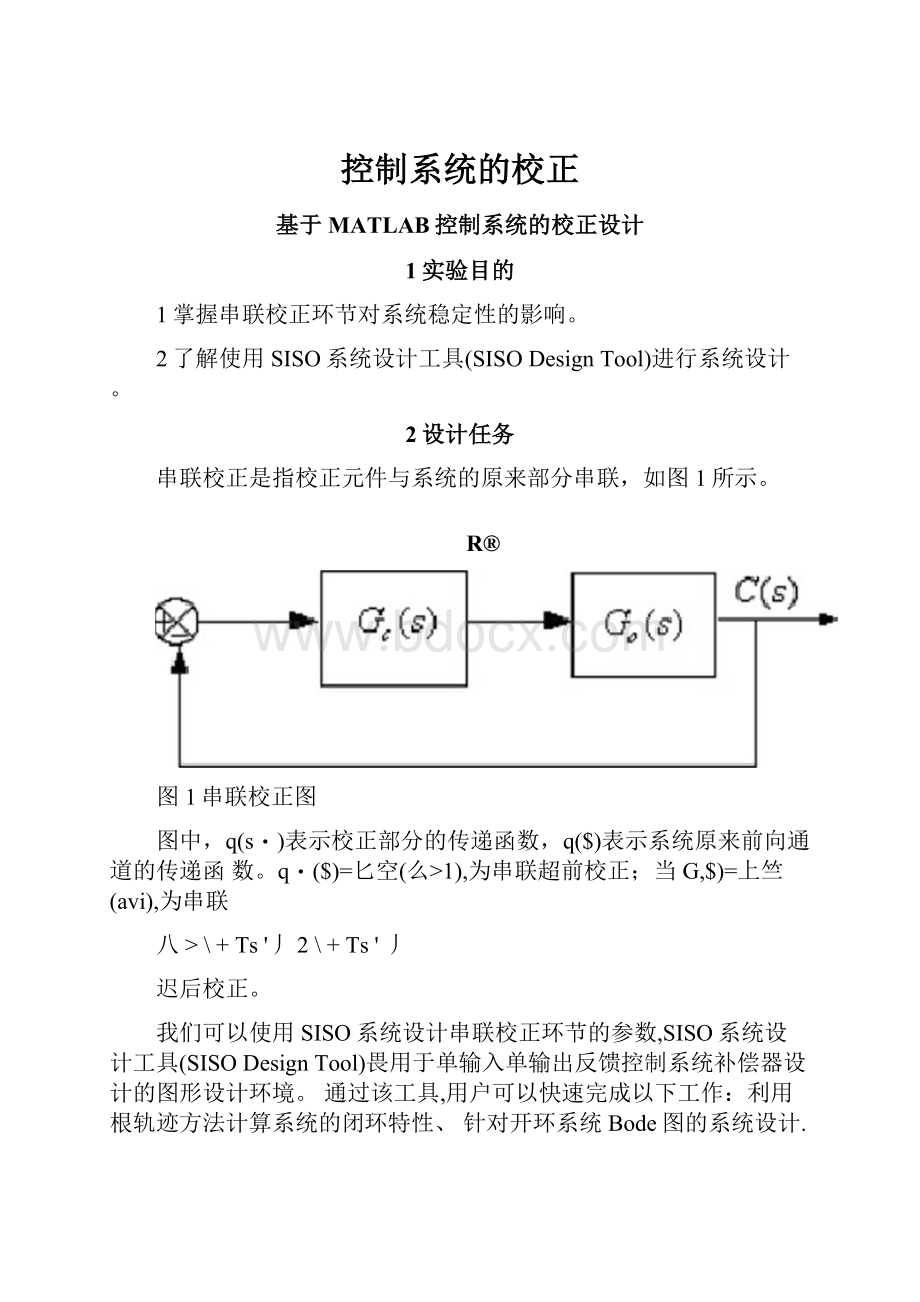
串联校正是指校正元件与系统的原来部分串联,如图1所示。
R®
图1串联校正图
图中,q(s・)表示校正部分的传递函数,q($)表示系统原来前向通道的传递函数。
q・($)=匕空(么>1),为串联超前校正;当G,$)=上竺(avi),为串联
八>\+Ts'丿2\+Ts'丿
迟后校正。
我们可以使用SISO系统设计串联校正环节的参数,SISO系统设计工具(SISODesignTool)畏用于单输入单输出反馈控制系统补偿器设计的图形设计环境。
通过该工具,用户可以快速完成以下工作:
利用根轨迹方法计算系统的闭环特性、针对开环系统Bode图的系统设计.添加补偿器的零极点、设计超前/滞后网络和滤波器、分析闭环系统响应、调整系统幅值或相位裕度等。
<1)打开SISO系统设计工具
在MATLAB命令窗口中输入sisotool命令,可以打开一个空的SISODesignTool,也可以在sisotool命令的输入参数中指定SISODesignTool启动时缺#打开的模型。
注意先在MATLAB的当前工作空间中定义好该模型。
如图2所不O
图3ImportSystemData对话框
(3)当前的补偿器(CurrentCompensator)
图2中当前的补偿器(。
"“毗Compensator)—栏显示的是目前设计的系统补偿器的结构。
缺省的补偿器增益是一个没有任何动态属性的单位增益,一旦在跟轨迹图和Bode图中添加零极点或移动曲线,该栏将自动显示补偿器结构。
(4)反馈结构
SISODesignTool在缺省条件下将补偿器放在系统的前向通道中,用户可以通过“+/」按钮选择正负反馈,通过“FS”按钮在如下图4几种结构之间进行切换。
图4SISODesignTool中的反馈控制结构
例1图1所示的控制系统,原开环传递函数为
一$(0.h+l)(0.3$+l)
用SISO系统设计工具(SISODesignTool)设计超前校正环节,使其校正后系统的静态速度误差系数心<6,相角裕度为45。
,并绘制校正前后的Bode图,并计算校正前后的相角裕度0⑴将模型载入SISO设计工具
在MATLAB命令窗口先定义好模型G,s)=—~,用MATLAB编程
s(0・l$+l)(0・3$+l)
如下:
num=2;
den=conv([0.I.1.0],[0,3,1]):
G=tf(num.den)运行得到结果如下:
Transferfunction:
2
0・03s3+0・4s2+s
输入sisotool命令,可以打开一个空的SISODesignTool,通过file/import令,可以将模型G载入SISO设计工具中,如图5所示。
图5改变增益后的系统
(2)调整增益
根据要求系统的静态速度误差系数心<6,补偿器的增益应为3,将图5中的
C(s)=l改为3,如图5所示。
从图中Bode相频图左下角可以看出相位裕度
Z=21.2\不满足要求。
从图中Bode相频图左下角可以看出相位裕度z=28.4\仍不满足要求,需进-步调整超前环节的参数。
(4)调整超前网络的零极点
将超前网络的零点移动到靠近原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中相角裕度的增长,一直到相角裕度达到45°,此时超前网络满足设计要求。
如图7所示。
从图中可以看出来,超前网络的传递函数为斗號笋最后系统的心=6,/=46°0
例2图1所示的控制系统,原开环传递函数为
Go(")=$(0.2$+1)
试用SISO系统设计工具(SISODesignTool)设计超前校正环节,使其校正后系统的静态速度误差系数KpMlOO,相角裕度为30°,并绘制校正前后的Bode图,并计算校正前后的相角裕度。
例3使用SISODesignTool设计直流电机调速系统。
典型电机结构示意图如图8所示,控制系统的输入变量为输入电压系统输出是电机负载条件下的转动角速度<y(z)o现设计补偿器的目的是通过对系统输入一定的电压,使电机带动负载以期望的角速度转动,并要求系统具有一定的稳定裕度。
*)〒+]4$+40.02
系统的设计指标为:
上升时间Z,<0.5s,稳态误差^<5%,最大超调量
幅值裕度L,>20dB,相角裕度/>40。
。
系统设计步骤:
(1)调整补偿器的增益
如果对该系统进行时域仿真,可发现其阶跃响应时间很大,提高系统响应速度的最简单方法就是增加补偿器增益的大小。
在SISO的设计工具中可以很方便的实现补偿器增益的调节:
鼠标移动到Bode幅值线上,按下鼠标左键抓取Bode幅值线,向上拖动,释放鼠标,系统自动计算改变的系统增益和极点。
既然系统要求上升时间r,<0.5s,应调整系统增益,使得系统的穿越频率吆位于3rad/s附近。
这是因为3rad/s的频率位置近似对应于0.33s的上升时间。
为了更清楚的查找系统的穿越频率,点击鼠标右键,在快捷菜单中选择“Grid”命令,将在Bode图中绘制网格线。
观察系统的阶跃响应,可以看到系统的稳态误差和上升时间已得到改善,但要满足所有的设计指标,还应加入更复杂的控制器。
<2)加入积分器
点击鼠标右键,在弹出的快捷菜单中选择"AddPole/ZeTO”下的“Integrator”菜单,这时系统将加入一个积分器,系统的穿越频率随之改变,应调整补偿器的增益将穿越频率调整回3rad/s的位置。
(3)加入超前校正网络
为了添加一个超前校正网络,在开环Bode图中点击鼠标右键,选择“AddPole/Zero"下的"Lead"菜单,该命令将在控制器中添加一个超前校正网络。
这时鼠标的光标将变成“X”形状,将鼠标移到Bode图幅频曲线上接近最右端极点的位置按下鼠标0
从Bode图中可以看出幅值裕度还没有达到要求,还需进一步调整超前环节的参数。
<4)移动补偿器的零极点
为了提高系统的响应速度,将超前网络的零点移动到靠近电机原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中幅值裕度的增长。
也可以通过调节增益来增加系统的幅值裕度。
试按照上述方法调整超前网络参数和增益,最终满足设计的要求。
3实验步骤及结果
上述例2中,试用S1S0系统设计工具(SISODesignTool)设计超前校正环节,使其校正后系统的静态速度误差系数KyMlOO,相角裕度为30°,并绘制校正前后的Bode图,并计算校正前后的相角裕度。
(1)将模型载入SISO设计工具
b
在MATLAB命令窗口先定义好模型G°(s)=—二
S(0・2f+1J
MATLAB程序如下:
num=I;
den=conv([L0],[0,2.1]);
G=tf(num.den)
输入sisotool命令,可以打开一个空的SISODesignTool,通过file/import
命令,可以将模型G载入SISO设计工具中,如图9所示:
(2)调整增益
根据要求系统的静态速度误差系数KpMlOO.补偿器的增益应为100,将上图中的C(s)=l改为100,如图10所示。
从图中Bode相频图左下角可以看出相位裕度Y=12.8O,不满足要求。
在开环Bode图中点击鼠标右键,选择“AddPole/Zero"下的"Lead"菜单,该命令将在控制器中添加一个超前校正网络。
这时鼠标的光标将变成“X"形状,将鼠标移到Bode图幅频曲线上接近最右端极点的位置按下鼠标,得到如下图11所示的系统:
图11调节至相位裕度Y可2・9°的系统
从图中Bode相频图左下角可以看出相位裕度yR2・9°,仍不满足要求,需进
图12相角裕度达到30°的系统
-步调整超前环节的参数。
(4)调整超前网络的零极点
超前网络的零点移动到靠近原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中相角裕度的增长,一直到相角裕度达到30°,此时超前网络满足设计要求,如图12所示。
从图中可以看出来,超前网络的传递函数为疇窖,最后系统的K严叫
y=30°。
3使用S1S0DesignTool设计直流电机调速系统。
直流电机动态模型本质上可以视为典型二阶系统,设某直流电机的传递函数为
宀'1・5
G($)=
')5-+145+40.02
系统的设计指标为:
上升时间J<0・5s,稳态误差最大超调量
幅值裕度->2ZB,相角裕度了>40。
。
(1)将模型载入SISO设计工具
在MATLAB命令窗口先定义好模型G(s)=
''$2+]4s+40.02
编MATLAB程序如下:
num=L5;
den=[]1440.02];
⑵调整补偿器的增益
鼠标移动到Bode幅值线上,按下鼠标左键抓取Bode幅值线,向上拖动,释放鼠标,系统自动计算改变的系统增益和极点。
既然系统要求上升时间r,<0.5s,应调整系统增益,使得系统的穿越频率咳,位于3rad/s附近。
这是因为3rad/s的频率位置近似对应于0.33s的上升时间。
此时,系统增益为34.&如下图14所示。
观察系统的阶跃响应,可以看到系统的稳态误差和上升时间已得到改善,但要满足所有的设计指标,还应加入更复杂的控制器0
⑶加入积分器
点击鼠标右键,在弹出的快捷菜单中选择“AddPole/Zero”下的"Integrator”菜单,系统加入一个积分器,系统的穿越频率随之改变,应调整补偿器的增益将穿越频率调整回3rad/s的位置,此时系统增益为108,如图15所示:
⑷加入超前校正网络
在开环Bode图中点击鼠标右键,选择"AddPole/Zero"下的"Lead"菜单,该命令将在控制器中添加一个超前校正网络。
这时鼠标的光标将变成“X”形状,将鼠标移到Bode图幅频曲线上接近最右端极点的位置按下鼠标。
如图16所示:
图16加入超前校正网格时的系统
从Bode图中可以看出幅值裕度还没有达到要求,还需进一步调整超前环节的参数。
⑸移动补偿器的零极点
为了提高系统的响应速度,将超前网络的零点移动到靠近电机原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中幅值裕度的增长。
如图17所示:
穿越频率©・=3・99rad/s,位于3rad/s附近,观察其阶跃响应,可以看到系统的稳态误差和超调量均满足要求,此时补偿器的传递函数为
—、108(1+0.28$)
C(沪£(1+002阴


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制系统 校正
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
建湖县建阳中学高考数学选择题专项训练一模.docx
-
届中考物理一轮复习第十七讲电与磁第二节发电机电动机.docx
-
建设工程勘察合同范本.docx
-
金融设备行业分析报告.docx
-
建筑施工企业技术管理制度 1.docx
-
V高中生物知识点总结全.docx
-
建投坐标软件说明书.docx
-
金属非金属露天矿山企业生产安全事故隐患排查治理体系实施指南.docx
-
建筑装饰施工实习报告.docx
-
经典诵读的好处演讲稿范文3篇.docx
-
建筑工程合同管理96058.docx
-
Xwgtup地理背诵.docx
-
标准化施工管理实施方案送审稿.docx
-
建筑外窗密封性能对外窗节能的影响.docx
-
xxx年政协常委会工作报告.docx
-
博士研究计划定稿.docx
-
江苏涟水郑梁梅中学1819学度高三下学期期初检测英语.docx
-
XX集团荒山开发绿化工程建设项目可行性研究报告.docx
-
精品小学二年级语文上册掌声公开课教案和板书设计.docx
