 传感器-总精度评价-MATLAB.docx
传感器-总精度评价-MATLAB.docx
- 文档编号:102739
- 上传时间:2022-10-03
- 格式:DOCX
- 页数:1
- 大小:40.59KB
传感器-总精度评价-MATLAB.docx
《传感器-总精度评价-MATLAB.docx》由会员分享,可在线阅读,更多相关《传感器-总精度评价-MATLAB.docx(1页珍藏版)》请在冰豆网上搜索。
传感器原理与应用
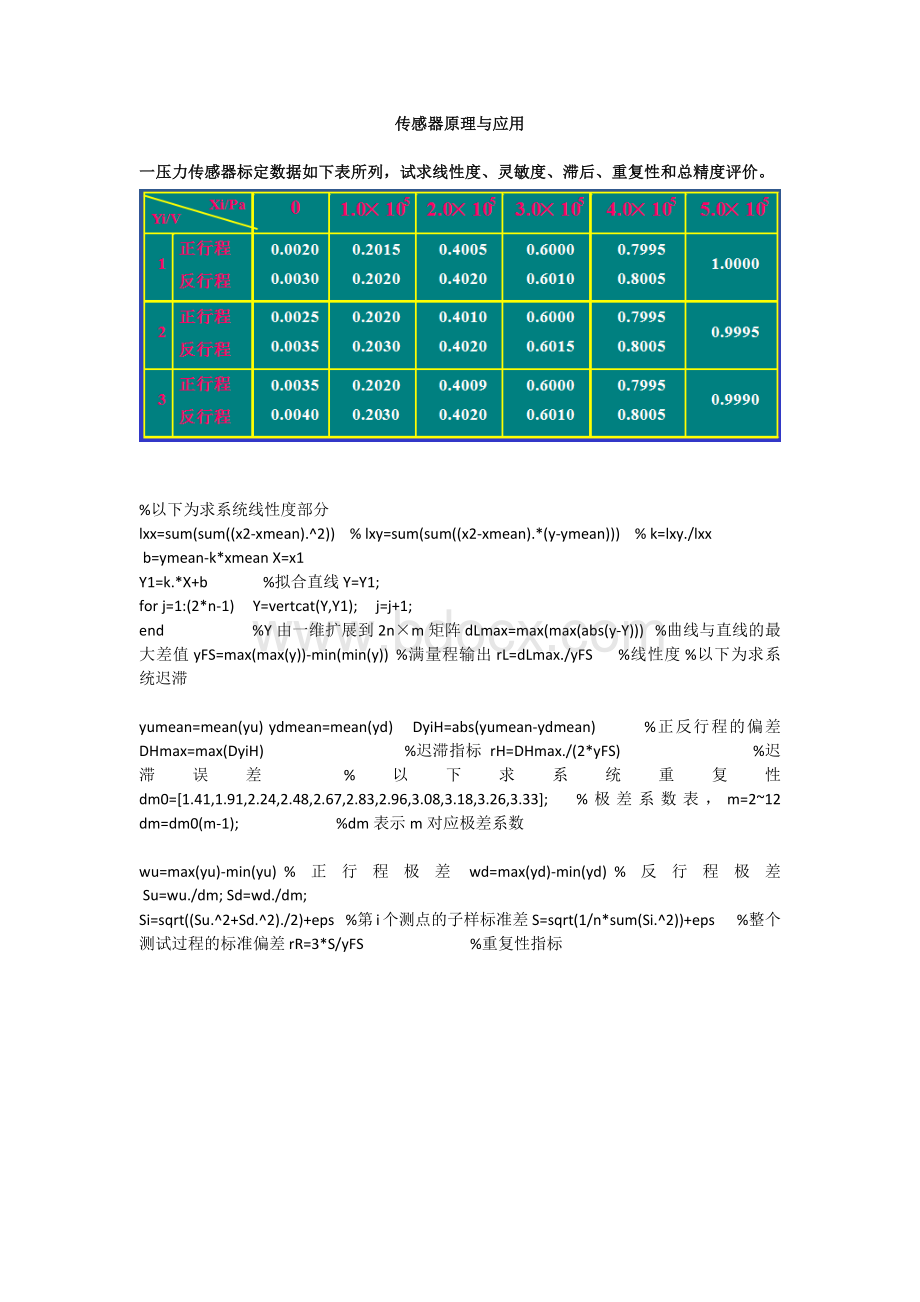
一压力传感器标定数据如下表所列,试求线性度、灵敏度、滞后、重复性和总精度评价。
%以下为求系统线性度部分
lxx=sum(sum((x2-xmean).^2)) % lxy=sum(sum((x2-xmean).*(y-ymean))) % k=lxy./lxx b=ymean-k*xmean X=x1
Y1=k.*X+b %拟合直线 Y=Y1;
for j=1:
(2*n-1) Y=vertcat(Y,Y1); j=j+1;
end %Y由一维扩展到2n×m矩阵 dLmax=max(max(abs(y-Y))) %曲线与直线的最大差值 yFS=max(max(y))-min(min(y)) %满量程输出 rL=dLmax./yFS %线性度 %以下为求系统迟滞
yumean=mean(yu)ydmean=mean(yd)DyiH=abs(yumean-ydmean)%正反行程的偏差DHmax=max(DyiH)%迟滞指标rH=DHmax./(2*yFS)%迟滞误差%以下求系统重复性dm0=[1.41,1.91,2.24,2.48,2.67,2.83,2.96,3.08,3.18,3.26,3.33];%极差系数表,m=2~12dm=dm0(m-1);%dm表示m对应极差系数
wu=max(yu)-min(yu) %正行程极差 wd=max(yd)-min(yd) %反行程极差 Su=wu./dm; Sd=wd./dm;
Si=sqrt((Su.^2+Sd.^2)./2)+eps %第i个测点的子样标准差 S=sqrt(1/n*sum(Si.^2))+eps %整个测试过程的标准偏差 rR=3*S/yFS %重复性指标


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 传感器 精度 评价 MATLAB
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 党组织、党员联系服务师生工作制度.docx
党组织、党员联系服务师生工作制度.docx
 物流与供应链管理 第七章 供应链综合计划.pptx
物流与供应链管理 第七章 供应链综合计划.pptx
-
民族团结教案doc格式.docx
-
民族团结教案doc格式.docx
-
中国象棋ppt模板.pptx
-
设备质量保证措施.docx
-
电力公司招聘行政能力测试试题及解析.docx
 回弹仪检测多孔砖砖强度计算表.xls
回弹仪检测多孔砖砖强度计算表.xls
-
汽车理论1.3.doc
-
电动汽车充换电站项目商业计划书.doc
-
幼儿园指南试题及答案.doc
-
护理教案模板.doc
-
资料台账表格.xlsx
-
红军长征的历史叙述是怎样形成的.docx
-
冷库工程合同.docx
-
部编版五年级上册语文课堂作业本答案(全).docx
-
《网络综合布线》说课稿.doc
-
材料进场,见证取样及检验制度.docx
-
20章--瓦斯综合利用.doc
-
[原创]STP保温板屋面及外墙保温施工技术方案.doc
-
隧道开挖作业台车计算书.docx
-
《减法的初步认识》教学设计.doc
-
教导处工作计划.docx
-
电机学第五版课后答案汤蕴璆完整版.docx
-
同仁堂案例成功启示.docx
-
经典钣金结构设计规范.doc
-
计算机各种进制转换练习题(附答案).doc
-
市场营销教学案例分析.docx
-
服装厂质量管理制度.docx
-
中职试验教材应用文写作(高教版_王崇国编)电子教案【全】.doc
-
控烟考评奖惩制度、标准、记录表.doc
-
小学生“学宪法-讲宪法”活动知识竞赛题库(含答案).docx
-
完整升级版泛海国际居住区售楼处的锅炉房机电工程施工组织设计.docx
-
网络安全预警系统中威胁评测系统关键技术研究.docx
-
微观经济学第三章习题及答案.docx
-
潍坊奥体项目市场调研分析报告.docx
-
文言阅读训练30篇阅读下面的文言文完成14题.docx
-
我国高校学费标准问题研究.docx
-
乌海市沙漠治理现状.docx
-
梧桐公馆二期安全文明施工组织设计.docx
-
五年级数学上册解简易方程综合练习题 40.docx
-
五年级语文上册第八组备课.docx
-
物理开放性试题题型分类及应考策略罗英.docx
-
物业管理服务质量体系.docx
-
西方经济学本期末温习题及参考答案.docx
-
吸烟危害健康讲座.docx
-
下高三语文 09 18.docx
-
县档案局工作计划与县水库移民后期帮扶计划汇编.docx
-
现代交换原理试题库带答案版讲解.docx
-
乡镇纪委上半年工作总结及下半年工作打算多篇范文与乡镇纪委上半年工作情况汇报汇编.docx
-
湘教版数学八年级上册《14 分式的加法和减法》教案.docx
