 机电控制应用一体化教案.docx
机电控制应用一体化教案.docx
- 文档编号:10139933
- 上传时间:2023-02-08
- 格式:DOCX
- 页数:9
- 大小:153.51KB
机电控制应用一体化教案.docx
《机电控制应用一体化教案.docx》由会员分享,可在线阅读,更多相关《机电控制应用一体化教案.docx(9页珍藏版)》请在冰豆网上搜索。
机电控制应用一体化教案
一体化教案首页
页
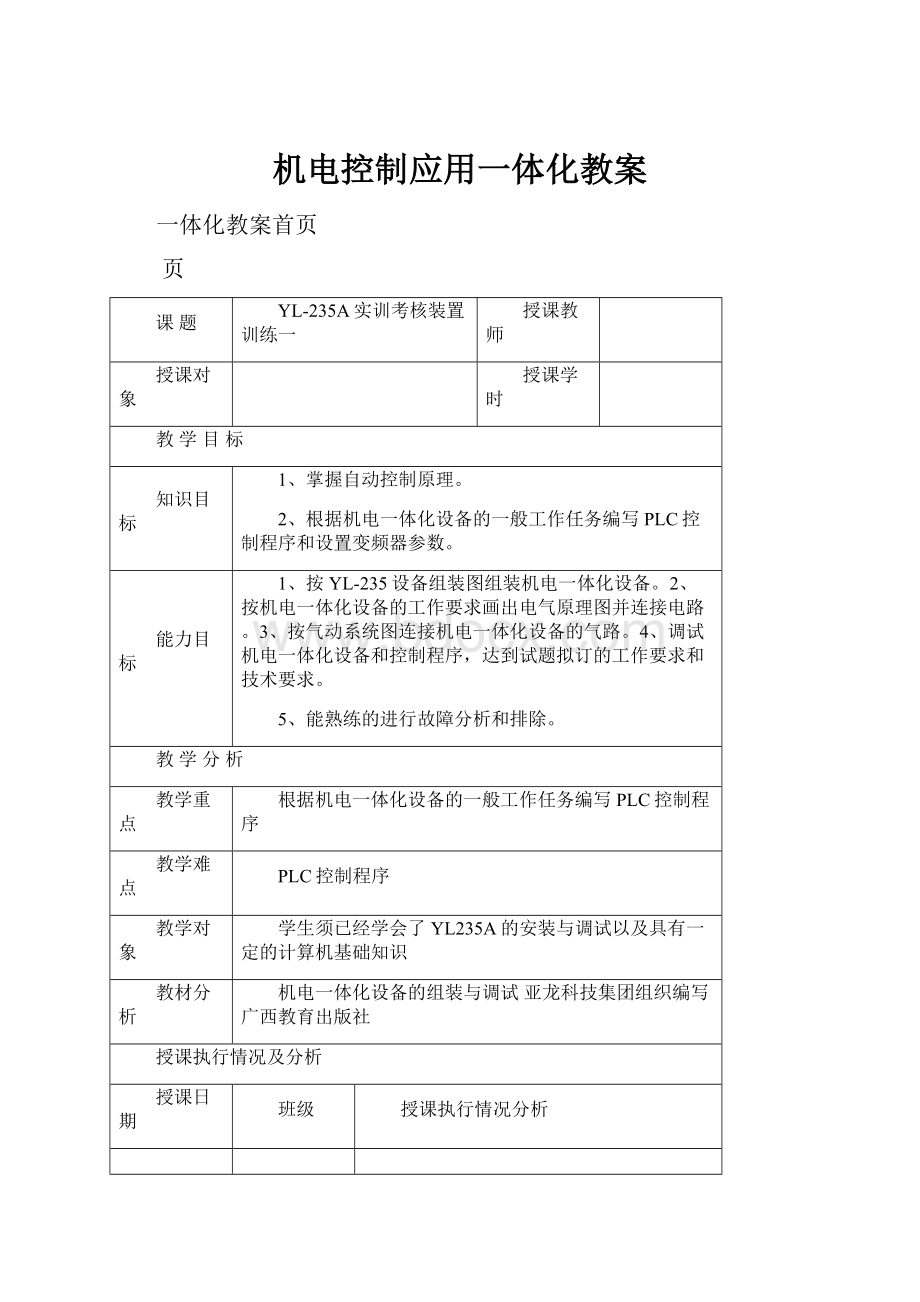
课题
YL-235A实训考核装置训练一
授课教师
授课对象
授课学时
教学目标
知识目标
1、掌握自动控制原理。
2、根据机电一体化设备的一般工作任务编写PLC控制程序和设置变频器参数。
能力目标
1、按YL-235设备组装图组装机电一体化设备。
2、按机电一体化设备的工作要求画出电气原理图并连接电路。
3、按气动系统图连接机电一体化设备的气路。
4、调试机电一体化设备和控制程序,达到试题拟订的工作要求和技术要求。
5、能熟练的进行故障分析和排除。
教学分析
教学重点
根据机电一体化设备的一般工作任务编写PLC控制程序
教学难点
PLC控制程序
教学对象
学生须已经学会了YL235A的安装与调试以及具有一定的计算机基础知识
教材分析
机电一体化设备的组装与调试亚龙科技集团组织编写广西教育出版社
授课执行情况及分析
授课日期
班级
授课执行情况分析
教
学
组
织
思
路
1、设计教学方式,
2、设计教学手段,
3、设计教学流程图
泰州技师学院一体化教案用纸
页
准备页
学时
教学准备
1、应出勤人,实际出勤人,请假人,
旷课:
2、准备教学设备:
多媒体链接
3、准备仪器仪表工具材料:
三菱小型PLC1台十字起1把万用表1只
项目介绍
1、本课题为两个学生一组,其中一个学生负责安装,另一个学生负责程序设计,完成调试之后,两个学生进行任务交换。
这样让学生在硬件软件方面都有所学。
通过这次实习可以让学生更加的了解PLC控制系统的控制原理。
2、课题工艺要求和技能要求:
保证硬件安装的可靠性,工艺性。
3、课题涉及的理论知识:
PLC的程序设计,机械安装,电路原理、启动原理,各种工艺规范。
项目分解
泰州技师学院一体化教案用纸
页
工作页
学时
操作技能讲解
理论知识链接
一、试题解读
1、硬件部分
2、初始位置
3、功能选择
第一种功能
第二种功能
4、保护装置
二、理论知识链接
三、实习过程
1、识图
2、元件布局图,固定原器件
3、连接电路
4、连接气路
5、程序设计
系统调试
监控程序运行
一、ⅩⅩ生产设备情况简介
ⅩⅩ生产设备(以下简称生产设备)由送料系统,气动机械手,皮带输送机等部件组成,工件有三种:
金属件、白色塑料、黑色塑料,各部件和一些主要原件的名称、安装位置如图所示
二、部件的初始位置及各元件的检查
机械手爪松、手升、臂缩、左摆;
各气缸缩回
三、设备运行
1、系统的调试
将SA1“调试/运行”转换开关旋转在“调试”位(左位),设备处于“调试”工作状态。
在调试状态下:
每按动一下SB5起动按钮,系统则运行一步,系统单步运行顺序:
悬臂活塞杆伸出→手臂活塞杆伸出→气爪夹紧→手臂活塞杆缩回→悬臂活塞杆缩回→悬臂向右旋转到位→悬臂活塞杆伸出→手臂活塞杆伸出→气爪打开→皮带机以20Hz频率前进运行10S→手臂活塞杆缩回→悬臂活塞杆缩回→悬臂向左旋转到位。
每按动一下SB6停止按钮,系统则按运行顺序向后返回一步。
如果两个按钮交替按,系统将在一个动作上来回执行。
2、系统的运行(工件加工检测)
将SA1“调试/运行”转换开关旋转在“运行”位(右位),设备处于“运行”工作状态。
系统工作前,必须确保各器件在原点位置,当不符合原点位置要求时,按下SB5起动按钮后,先使系统恢复到原位,再点亮HL1,自动进入运行状态。
有金属、白色塑料、黑色塑料三种零件需要加工成成品。
送料电机驱动放料盘旋转,当工件放置台的光电传感器检测到有工件时,机械手将悬臂伸出→手臂伸出→气爪夹紧,夹紧后延时1S→手臂缩回→悬臂缩回→悬臂向右旋转到位→悬臂伸出→手臂伸出→气爪打开,将工件放到皮带输送机上。
机械手放下夹持的工件1s后,手臂缩回→悬臂缩回→转动至左侧极限位置,当工件放置台的光电传感器检测到有工件时,机械手重复以上的动作。
皮带输送机放料位置的漫射型光电传感器检测到工件后,指示灯HL1熄灭,拖动皮带输送机的交流电动机以25Hz的频率启动前进传送工件,变频器的爬坡时间为1S,制动时间为0.5S。
加工要求:
正对皮带输送机,从左到右有A、B、C套检测装置,检测传感器有1个电感式接近开关,2个光纤传感器,检测传感器的排列顺序及灵敏度,根据工艺要求由选手自定。
工件到达C位后,皮带停止,进行第一道工序加工6S,然后皮带输送机以30Hz的频率反转回B位后,皮带停止,进行第二道工序加工5S,然后皮带输送机以20Hz频率反转回A位后,皮带停止,进行第三道工序加工7S。
三道工序加工完后,进行工件的检测,皮带机正传频率为25Hz,反转频率为30Hz,将金属件推入A位溜槽,黑色塑料件推入B位溜槽。
白色塑料件推入C位溜槽。
注:
皮带输送机上每次只能加工检测一个工件。
四、“运行”状态下装配设备的保护装置
(1)原位保护
原点位置要求:
①机械手气爪松开,机械手手臂、悬臂气缸活塞杆缩回,机械手停止在左侧的极限位置;
②皮带输送机拖动电动机停转,三个单出杆气缸活塞杆缩回。
(2)无料保护
系统在正常运行中,若工件放置台、机械手、皮带输送机上均无工件,15S后,HL2报警灯以1Hz频率闪烁5S后,系统停止。
(3)设备的正常停止
设备在工作过程中,按下停止按钮SB6,设备在完成当前机械手的搬运及分拣,设备恢复到原位后停止。
(4)设备的急停
系统工作时,如果按下急停按钮,系统立即停止,直至拔出急停按钮并且按下启动按钮,系统才接着急停前的状态运行。
(5)功能保护
若加工设备上还有工件运行时就进行功能的转换,必须将该工件推入下料槽后才能实现功能的切换。
(6)过载保护
当皮带输送机发生过载时,过载触点动作(按钮SB1按下,常开触点接通),此时蜂鸣器鸣叫,提示发生过载。
若过2s后过载仍未消除,则皮带输送机停止运行。
当过载消除(按钮SB1复位,常开触点断开)后,蜂鸣器停止鸣叫。
按钮SB1复位后,按下启动按钮SB5,皮带输送机重新按停止的状态上继续运行。
见程序1
思考与提问
针对关键和重要的理论和技能知识点,设计思考与提问
巡回指导要求
1、巡回指导的重点内容和要求:
安装设备时注意设备的维护,以及安装的牢固性
2、巡回指导的时间:
3、巡回指导发现的问题:
知识小结
1、对课题工艺要求和操作技能小结
2、对实训过程中发现的问题做集中分析
3、对于课题涉及的理论知识小结
布置作业
1、PLC程序设计


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机电 控制 应用 一体化 教案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 333教育综合.docx
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
61401客列检检车员作业指导书.docx
-
80868088微机原理及应用II实验指导书.docx
-
Java实验三参考答案昆工版本.docx
-
111随机抽样.docx
-
900t轮胎式搬运机作业指导书.docx
-
091024异法方宜论篇第五讲.docx
-
ARM流水线之欧阳历创编.docx
-
Oracle维护必读经典.docx
-
gq6周年回顾报道京都寻宋.docx
-
IT项目在采购中如何降低成本doc 9页.docx
-
FC吞食天地2金手指资料.docx
-
120mm板模板扣件式计算书.docx
-
Asian Traditional Archery Grip on the Bow.docx
-
Excel函数大全.docx
-
145 大般涅盘经110剖析.docx
-
CPA审计知识点归纳.docx
-
5111产业创新团队申报表.docx
-
Along with the advance of the society more and more problems are brought to our attention.docx
-
统计学试题库选择题和判断题Word文档格式.docx
-
医疗质量考核办法三级综合医院图文Word格式.docx
-
车工实习报告Word格式.docx
-
上海市虹口区届高三上学期期末教学质量监控测试物理试题Word文档格式.docx
-
毕设论文 药农残留光电快速检测电气系统的设计Word文档下载推荐.docx
-
三软突出煤层掘进工作面综合防突措施执行细则Word文档格式.docx
-
三年级下册英语第五单元教案文档格式.docx
-
开拓大道绿化工程施工组织设计文档格式.docx
-
卤代烃练习题文档格式.docx
-
医院奖惩实施细则Word文档格式.docx
-
英语学科教学质量分析报告Word文档下载推荐.docx
-
《地球运动》和《天气系统》专题训练 学生版Word下载.docx
-
质量管理部门工作职责说明书文档格式.docx
-
考研英语常用到的高频词汇Word文档格式.docx
-
遗传算法求解函数最大值Word文档格式.docx
-
《分析化学》实验报告册Word文档格式.docx
-
望子成龙望女成凤的五步曲Word文档下载推荐.docx
-
八年级正考中考信息技术题库Word下载.docx
-
可借鉴的精彩主题式语段摘抄Word下载.docx
