 电子大赛一等奖 悬挂运动控制系统.docx
电子大赛一等奖 悬挂运动控制系统.docx
- 文档编号:10103561
- 上传时间:2023-02-08
- 格式:DOCX
- 页数:16
- 大小:59.08KB
电子大赛一等奖 悬挂运动控制系统.docx
《电子大赛一等奖 悬挂运动控制系统.docx》由会员分享,可在线阅读,更多相关《电子大赛一等奖 悬挂运动控制系统.docx(16页珍藏版)》请在冰豆网上搜索。
电子大赛一等奖悬挂运动控制系统
悬挂运动控制系统[05电子大赛一等奖]
文章来源:
凌阳科技教育推广中心
作者:
西安航空技术高等专科学校(李新钊胡春雷钱建松) 发布时间:
2006-5-2911:
28:
19
摘 要:
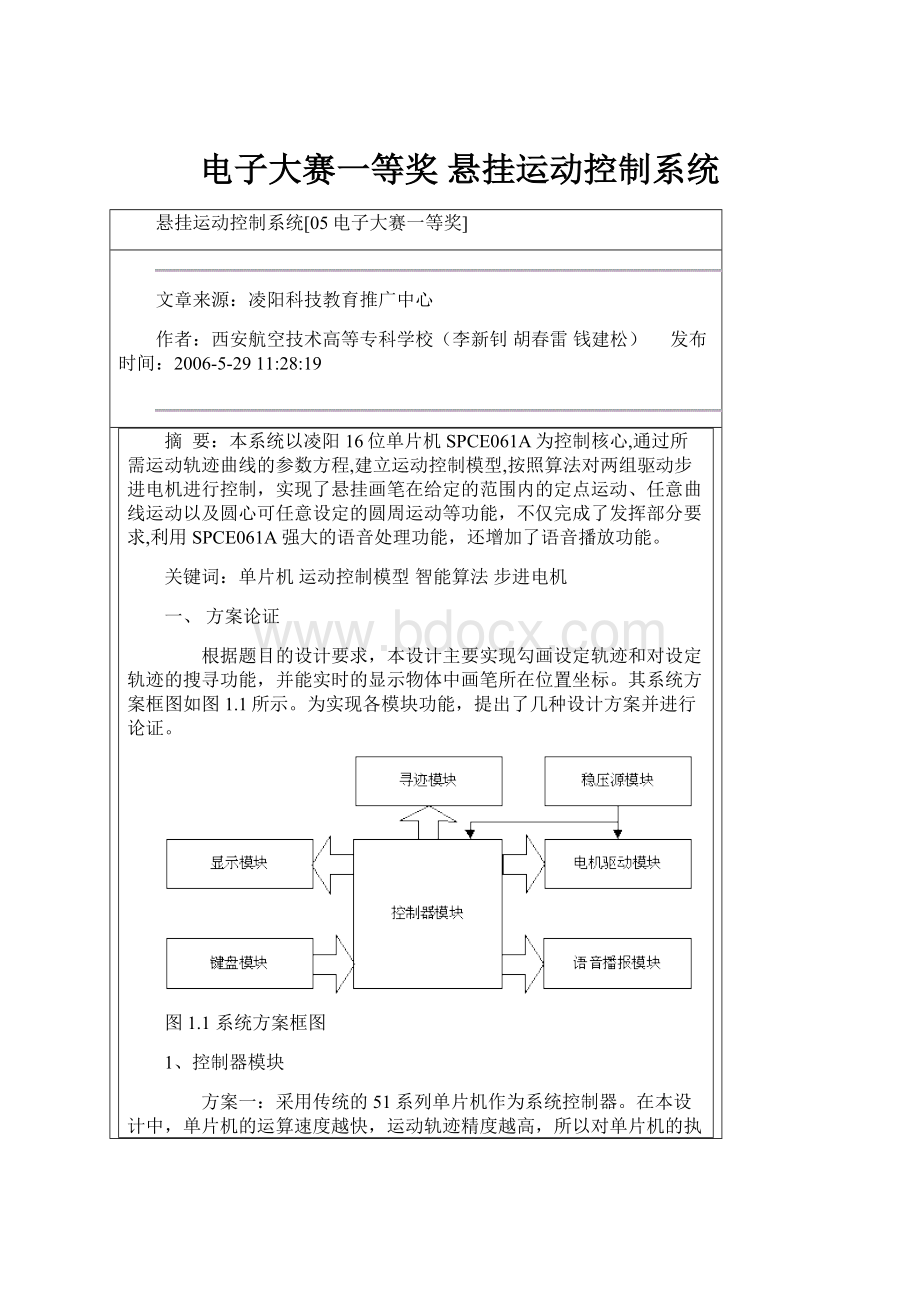
本系统以凌阳16位单片机SPCE061A为控制核心,通过所需运动轨迹曲线的参数方程,建立运动控制模型,按照算法对两组驱动步进电机进行控制,实现了悬挂画笔在给定的范围内的定点运动、任意曲线运动以及圆心可任意设定的圆周运动等功能,不仅完成了发挥部分要求,利用SPCE061A强大的语音处理功能,还增加了语音播放功能。
关键词:
单片机运动控制模型智能算法步进电机
一、 方案论证
根据题目的设计要求,本设计主要实现勾画设定轨迹和对设定轨迹的搜寻功能,并能实时的显示物体中画笔所在位置坐标。
其系统方案框图如图1.1所示。
为实现各模块功能,提出了几种设计方案并进行论证。
图1.1系统方案框图
1、控制器模块
方案一:
采用传统的51系列单片机作为系统控制器。
在本设计中,单片机的运算速度越快,运动轨迹精度越高,所以对单片机的执行速度有较高的要求;又由于本系统程序量较大,使用的I/O口资源较多,对于51来说,实现这些功能都比较困难。
方案二:
采用凌阳16位单片机SPCE061A作为控制核心。
与51相比,SPCE061A具有更加丰富的资源:
具有32个可编程的I/O口,14个中断源;CPU的工作时钟频率可以高达49.152MHZ,可以更好地满足本设计对数据处理速度的要求;独特的语音功能可使本系统具有更好的人机交互界面。
综上分析,选择方案二。
2、电机驱动模块
在本设计中,主控制器通过对电机的步进数控制来实现物体的运动,从而作出各种运动轨迹,设计思想是将物体的运动转换为拉线的伸缩,最终将伸缩量转化为电机的步数,从便于软件设计的角度出发,采用了57BYG系列两相混合式步进电机作为被控电机,这种具有较高的控制精度,速度的可控性好,制动性强。
其驱动方案如下:
采用微步进驱动模块,微步进驱动模块是由微控制器外接D/A转换器及光耦隔离电路组成的,它可以产生步进电机所需的相序脉冲。
系统单片机只需提供电机转动的方向信号和步进脉冲,其硬件连接简单,程序易编写,且节省I/O口。
所以本系统采用步进电机微步进驱动电路。
3、语音模块
由于本设计采用的控制芯片是凌阳SPCE061A单片机,该芯片本身具有语音功能,所以本系统只需利用SPCE061A为核心的精简开发板,就可以实现语音功能,不需再做专门的语音模块。
4、寻迹模块
方案一:
采用热探测器。
由于温度变化是因为吸收热能辐射能量引起的,与吸收红外辐射的波长没有关系,即对红外辐射吸收没有波长的选择,因此受外界环境影响比较大。
方案二、采用单光束反射取样式光电传感器ST178作为敏感元件,利用红外线对不同颜色的反射系数不同而产生强弱电流信号,所以受外界环境的影响比较小,抗干扰性比较强。
基于以上两种方案比较,采用方案二。
二、 详细软硬件设计
1、硬件设计
系统电路连接及硬件资源分配
本系统硬件电路连接图见图2.1。
图2.1 系统电路连接图
SPCE061A的硬件资源分配见表2.1。
表2.1 SPCE061A单片机硬件资源分配表
I/O口资源使用情况
使用
IOA[10:
0]用于LCD液晶显示
IOA[14:
11]用于电机驱动控制
IOB[7:
0]用于4×4矩阵式键盘
IOB[11:
8]用于传感器光电检测
Timer使用情况
TimerA
未使用
TimerB
未使用
中断使用情况
FIQ:
语音播放中断服务程序
寻轨迹控制策略
根据题目的要求,悬挂物沿曲线运动的轨迹分为两段,连续段和间断段。
可采用4个光电传感器作为检测元件,其放置方式如图2.2所示。
图2.2 4个光电传感器放置方式
在连续段寻迹时,通过判断四个传感器的16种组合状态,使电机作出相应的伸缩动作。
当轨迹为间断线时,电机拉动传感器在大角度方向内位移,直到在某一方向检测到新的黑线为止。
然后再调用连续段的寻迹程序。
系统各模块单元电路设计
(1)电源部分电路设计
本系统中使用了两相混合式步进电机,其额定工作电流达到2.0A,而W78××系列组件,最大输出电流为1.5A,因此电路中采用了外接大功率三极管C5297来扩大电流输出范围,其电路如图2.3所示。
在7815的输出极加上大功率三极管,扩流后的电流为
Io=Io′+Ic上式中Io′是7815的输出端电流,Ic为三极管集电极电流。
扩大后的电流达到2.0A以上,满足系统电机驱动电流的要求。
图2.3 电源电路
(2)语音播报模块设计
凌阳SPCE061A单片机自带双通道DAC音频输出,DAC1、DAC2转换输出的模拟量电流信号分别通过AUD1和AUD2管脚输出,DAC输出为电流型输出,经LM396音频放大,即可驱动喇叭放音。
放大电路如图2.4所示。
图2.4 语音播报电路
(3)寻迹部分电路设计
根据题目的要求,悬挂物体要沿着黑线运行,采用反射式光电传感器进行探测。
光电传感器的硬件设计如图2.5所示。
电压比较器LM393的同相输入Ⅴin拉低,输出为低电平。
当检测到黑线时,接收管截止,同相输入Ⅴin为高,比较器输出为高电平。
本系统中四个传感器的的OUT分别连接IOB8~IOB11。
图2.5 寻迹电路
(4)显示模块设计
在系统中,利用通用的液晶1602作为显示模块实时显示寻迹或者定点的坐标。
液晶1602的技术参数为:
◆显示容量:
32个字符,每个字符为5×7点阵,分2行,每行16列
◆芯片工作电压:
4.5-5.5V
◆工作电流:
2mA(5.0V)
◆模块最佳工作电压:
5.0V
◆字符尺寸:
2.95×4.35(W×H)mm
其典型应用接口图如图2.6。
本系统中DB0~DB7连接SPCE061A的IOA0~IOA7,EP连接IOA8,R/W连接IOA9,RS连接IOA10。
图2.6 1602与单片机典型接口
(5)键盘模块电路设计
根据设计需求,本系统中使用了标准的4×4键盘,其电路原理图如图2.7。
图中C1~C4为4×4键盘的列信号,L1~L4为4×4键盘的行信号。
在本系统中,用IOB4~IOB7连接键盘的列信号C4~C1;用IOB0~IOB3连接键盘的行信号L4~L1。
图2.7 4×4键盘电路原理图
在本系统中,S1~S3、S5~S7、S9~S11、S13为数字键,如图2.8,S4、S8、S12、S14~S16为功能键。
图2.8 4×4键盘功能图
2、软件设计
理论分析与计算
1、位移/脉冲转换方法:
给步进电机一定频率的脉冲,使电机拖动一载体移位100cm,记录下此期间所给脉冲总数z,由此则步进电机拉动载体位移1mm所需的脉冲数
(注意给定的频率不要太高,否则会出现丢步。
多测几次,取脉冲数相近的那个脉冲数z),因此,直接可将拉线的位移转化为送给电机的脉冲个数。
脉冲的频率决定转速,脉冲个数决定位移。
2、点到点运动核心算法:
结合图2.9说明,假设E(x0,y0),F(x1,y1)为给定平面范围上的任意两点,作辅助线(图中虚线部分),在直角三角形⊿ABE中
a0=
;
在直角三角形⊿CDE中:
b0=
同理对于F点,两拉线长分别为:
a1=
b1=
因此当悬挂物从E点运动到F点时:
电机1的收放线长度为c(当c<0,电机正转(或拉线伸长);c>0时,电机反转(或拉线收缩))
c=a0-a1
电机2的收放线长度为d(当d<0,电机反转(或拉线收缩),当d>0时,电机正转(或拉线伸长))
d=d0-d1
根据c,d的正负分别确定电机1,电机2的正反转向。
而根据c,d的绝对值来确定电机1,电机2各自所需的脉冲数:
电机1所分配的脉冲数:
m=
×p
电机2所分配的脉冲数:
n=
×p
图2.9 点到点运动示意图
3、误差补偿:
为了使运动轨迹更加平滑,采用按比例分配脉冲的原则进行交替送脉冲,电机2所运行的脉冲数是电机1所运行的脉冲数的
倍,因此电机1每运行t个脉冲,电机2就需要运行
×t个脉冲,该算法可能会造成电机2所送的脉冲数与理论计算脉冲数稍有偏差,因此加入适当的补偿程序,使得所运行轨迹精度更高,曲线更平滑。
4、数学模型:
本设计要求悬挂物能够画一个圆,设所画圆的圆心坐标为(x0,y0)半径为固定的25cm,(x,y)为圆周上的任意一点,由此确定圆的方程为:
(x-x0)^2+(y-y0)^2=25^2
若直接使用该方程来求圆上点的坐标,算法比较复杂,采用了圆的参数方程:
X=x0+25sint;
Y=y0+25cost; (x0,y0)为圆心坐标
这样,则圆的坐标仅与参数t有关,因此,使角度t以某一设定的角度步长v累加,使t+q×v在周期[t,t+2π]内变化,其中q为累加步数。
这样就可以采样到圆上均匀的点,显然,角度步长v越小,在圆周上取得点越多,控制也会更精确。
程序流程
(1)主程序
本系统软件设计采用凌阳μ'nSP的汇编语言与C语言交叉使用,可固化、可剪裁,以实现系统所要求的各项功能。
系统软件主程序流程图如图2.10所示:
图2.10 主程序流程图
(2)定点运动子程序
通过对步进电机的控制,使悬挂物从初始位置运动到指定点流程图如图2.11所示:
图2.11 定点运动子程序流程图
(3)画圆子程序
根据圆的参数方程的计算圆上点的坐标,通过调用定点程序来实现,画圆程序流程图如图2.12所示。
图2.12 画圆子程序流程图
(4)寻迹子程序
通过判断传感器的不同状态值,作出相应的处理动作,当遇到断点时,多角度检测下段的黑线,直到再次检测到黑线。
寻迹流程图如图2.13所示。
图2.13 寻迹子程序流程图
三、 测试说明
1、测试指标
将设计题目所要求的各基本功能和发挥部分进行分项测试。
2、测试仪器
测试使用的仪器设备如表3.1所示。
表3.1 测试使用的仪器设备
序号
名称、型号、规格
数量/台
备注
1
数字万用表:
VC9806
1
胜利公司
2
微机稳压电源:
WD-4
1
启东计算机总厂
3
双踪示波器DS5022M
1
RIGOL
4
米尺
1
-
5
秒表
1
-
2、自行设定运动测试
将物体放在坐标原点,控制物体作自行设定的运动。
运动距离设定为136cm,完成时间为55.86s。
表3.2是多次测试的纪录。
表3.2自行设定运动测量数据
测试次数
1
2
3
行程/cm
136
136
136
全程行使时间/s
55.86
55.45
55.65
3、圆周运动测试
首先设定圆心坐标,根据给定半径,单片机控制物体运动到画圆的起始位置,并语音提示开始画圆。
经测试所画圆的最大轨迹误差为0.5cm,所用时间为48.56秒。
经过多次测试完成良好。
表3.3圆周运动测量表
测试次数/次
设定圆心坐标(X,Y)
画笔位置坐标显示情况
完成时间/s
完成情况
误差/cm
其他发挥
1
40.00,50.00
实时显示
48.83
良好
0.10
语音提示
2
45.00,55.00
实时显示
48.56
良好
0.10
语音提示
3
35.00,50.00
实时显示
47.85
良好
0.10
语音提示
4、定点运动测试
首先设定物体所要到达的一个点的坐标,控制物体总左下角原点出发,在规定时间内较好的完成了题目要求。
表3.4是多次测试的纪录。
表3.4定点运动测量数据
序号
设定坐标(x,y)
实际测量
误差/cm
完成时间/s
其他发挥
1
45.00,55.00
44.80,54.80
0.20~0.50
22.55
语音提示
2
40.00,40.00
39.80,39.70
0.23~0.45
16.80
语音提示
3
70.00,85.00
69.80,84.40
0.24~0.38
28.33
语音提示
5、寻迹测试
利用光电测试模块,由单片机控制物体作任意形状的寻迹运动,并能判断间断线段,表3.5为多次测试的结果。
表3.5寻迹测量数据
序号
连续线段寻迹情况
完成时间/s
间断线段寻迹情况
完成时间/s
1
完成
32.87
完成
26.28
2
完成
32.80
完成
26.31
3
完成
32.90
完成
25.98
参考文献
[1]梅遂生,杨家德.光电子技术——信息装备的新秀[M].北京:
国防工业出版社,1999
[2]张友德,赵志英,涂时亮。
单片机微型机原理应用与实验(第三版)[M].上海:
复旦大学出版社,2000
[3]黄智伟.全国大学生电子设计竞赛训练教程[M].北京:
电子工业出版社,2005
[4]罗亚非.凌阳16位单片机应用基础[M].北京:
北京航空航天大学出版社.2005
[5]薛钧义.凌阳16位单片机原理及应用[M].北京:
北京航空航天大学出版社.2003
[6]何希才.电动机控制电路应用电路实例[M]。
北京:
中国电力出版社.2005


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 电子大赛一等奖 悬挂运动控制系统 电子 大赛 一等奖 悬挂 运动 控制系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
各行业邮件营销统计分析报告完美版.docx
-
《义务教育语文课程标准》最新修订版.docx
-
临电临水专项施工.docx
-
大学英语综合教程二第六单元答案.docx
-
建筑工程施工转包违法分包等违法行为认定查处管理办法释义.docx
-
多头小直径防渗墙方案.docx
-
创建文明单位事迹材料.docx
-
《财务成本管理》模拟试题五.docx
-
大学英语考试考前冲刺卷九13测.docx
-
K12学习XX年一年级语文下册全册教案部编版.docx
-
新版建规解读.docx
-
中医大外科学习题.docx
-
选调生工作表现及实.docx
-
七年级数学上册 有理数的混合运算教案二 北师大版.docx
-
大学生网络借贷消费心理分析及对策研究教育作文文档.docx
-
鄂三年级上学期心理健康全册教案.docx
-
水表基础知识讲解.docx
-
研发设计管理试行办法上报集团.docx
-
焊工知识竞赛试题及参考答案.docx
