 机器人腕部结构.docx
机器人腕部结构.docx
- 文档编号:10077062
- 上传时间:2023-02-08
- 格式:DOCX
- 页数:10
- 大小:456.39KB
机器人腕部结构.docx
《机器人腕部结构.docx》由会员分享,可在线阅读,更多相关《机器人腕部结构.docx(10页珍藏版)》请在冰豆网上搜索。
机器人腕部结构
机器人腕部结构
1、定义:
腕部是臂部和手部的连接件,起支承手部和改变手部姿态的作用。
2、手腕的自由度:
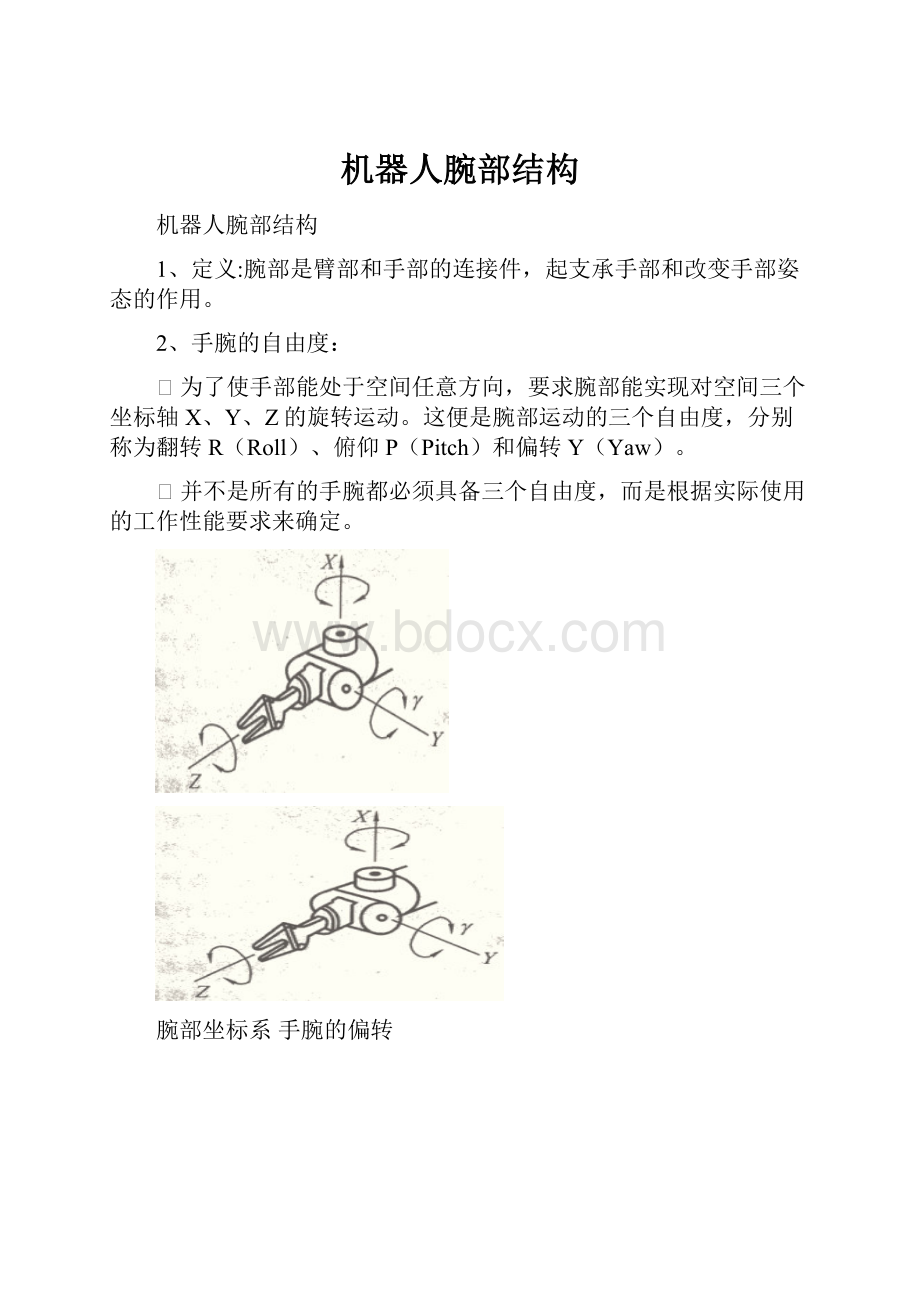
⏹为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X、Y、Z的旋转运动。
这便是腕部运动的三个自由度,分别称为翻转R(Roll)、俯仰P(Pitch)和偏转Y(Yaw)。
⏹并不是所有的手腕都必须具备三个自由度,而是根据实际使用的工作性能要求来确定。
腕部坐标系手腕的偏转
手腕的仰俯手腕的回转
3、手腕的设计要求
⏹结构紧凑、重量轻;
⏹动作灵活、平稳,定位精度高;
⏹强度、刚度高;
⏹与臂部及手部的连接部位的合理连接结构,传感器和驱动装置的合理布局及安装等。
4、手腕的分类
(1)二自由度手腕:
可以由一个R关节和一个B关节联合构成BR关节实现,或由两个B关节组成BB关节实现,但不能由两个RR关节构成二自由度手腕,因为两个R关节的功能是重复的,实际上只起到单自由度的作用。
BR手腕BB手腕
RR手腕(属于单自由度)
(2)三自由度手腕:
有R关节和B关节的组合构成的三自由度手腕可以有多种型式,实现翻转、俯仰和偏转功能。
BBR手腕BRR手腕
5.按手腕的驱动方式分:
⏹直接驱动手腕:
⏹驱动源直接装在手腕上。
这种直接驱动手腕的关键是能否设计和加工出尺寸小、重量轻而驱动扭矩大、驱动性能好的驱动电机或液压马达。
⏹远距离传动手腕:
⏹有时为了保证具有足够大的驱动力,驱动装置又不能做得足够小,同时也为了减轻手腕的重量,采用远距离的驱动方式,可以实现三个自由度的运动。
液压直接驱动BBR手腕图例
远距离传动手腕图例
6、典型结构
(1)摆动液压缸(又称回转液压缸):
⏹结构:
⏹由缸体、隔板、叶片、花键套等主要部件构成。
其中叶片7固定在转子上,用花键将转子与驱动轴连接,用螺栓2将隔板与缸体连接。
⏹工作原理:
⏹在密封的缸体内,隔板与活动叶片之间围成两个油腔,相当油缸中的无杆腔和有杆腔。
液压力作用在活动叶片的端面上,对传动轴中心产生力矩使被驱动轴转动。
摆动缸转角在270°左右。
(2)单自由度回转运动手腕:
⏹结构特点:
⏹机器人手部的张合是由汽缸驱动的,而手腕的回转运动则由回转液压缸实现。
⏹工作原理:
⏹将夹紧汽缸的外壳与摆动油缸的动片连接在一起,当摆动液压缸中不同的油腔中进油时,即可实现手腕不同方向的摆动。
(3)双回转油缸驱动手腕:
⏹结构特点:
⏹采用双回转油缸驱动,一个带动手腕作俯仰运动,另一个油缸带动手腕作回转运动。
⏹V-V视图表示的回转缸中动片带动回转油缸的刚体,定片与固定中心轴联结实现俯仰运动;L-L视图表示回转缸中动片与回转中心轴联结,定片与油缸缸体联结实现回转运动。
(4)轮系驱动的二自由度BR手腕:
⏹结构特点:
⏹由轮系驱动可实现手腕回转和俯仰运动,其中手腕的回转运动由传动轴S传递,手腕的俯仰运动由传动轴B传递。
⏹回转运动:
轴S旋转→锥齿轮副Z1、Z2→锥齿轮副Z3、Z4→手腕与锥齿轮Z4为一体→手腕实现绕C轴的旋转运动
⏹俯仰运动:
轴B旋转→锥齿轮副Z5、Z6→轴A旋转→手腕壳体7与轴A固联→手腕实现绕A轴的俯仰运动
⏹附加回转运动:
轴S不转而B轴回转→锥齿轮Z3不转→锥齿轮Z3、Z4相啮合→迫使Z4绕C轴线有一个附加的自转,即为附加回转运动。
⏹附加回转运动在实际使用时应予以考虑。
必要时应加以利用或补偿。
(5)轮系驱动的三自由度手腕:
⏹结构特点:
⏹该机构为由齿轮、链轮传动实现的偏转、俯仰和回转三个自由度运动的手腕结构。
⏹回转运动:
⏹轴S旋转→齿轮副Z10/Z23、Z23/Z11→锥齿轮副Z12、Z13→锥齿轮副Z14、Z15→手腕与锥齿轮Z15为一体→手腕实现旋转运动
⏹俯仰运动:
⏹轴B旋转→齿轮副Z24/Z21,Z21/Z22→齿轮副Z20、Z16→齿轮副Z16、Z17→齿轮副Z17、Z18→轴19旋转→手腕壳体与轴19固联→实现手腕的俯仰运动
⏹偏转运动:
⏹油缸1中的活塞左右移动→带动链轮2旋转→锥齿轮副Z3/Z4→带动花键轴5、6旋转→花键轴6与行星架9连在一起→带动行星架及手腕作偏转运动


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人 腕部 结构
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
安全生产标准化 法律法规识别清单版 最新.docx
-
八年级上册物理知识要点.docx
-
八年级英语下册Unit6 An old man tried to move the mountains导学案人教版.docx
-
白杨礼赞教案.docx
-
板蓝根的功效与作用板蓝根的药用价值.docx
-
备战高考英语纠错笔记系列专题01名词主谓一致和冠词.docx
-
毕业总结终极版.docx
-
表示回忆的语句doc.docx
-
财政部最新会计电算化考试大纲及解析版经典打印版.docx
-
参考文档201X自荐书范文模板实用word文档 9页.docx
-
厂房基坑及尾水渠施工降排水措施.docx
-
宠物Baby主题服务网站创业项目商业计划书.docx
-
初级电算化练习题.docx
-
传感器实验指导书重点.docx
-
创业计划竞赛21.docx
-
村庄建设规划说明样本.docx
-
大市政雨污水管道工程施工方案.docx
-
带升降铁管拼装舞台.docx
-
单位制度建设计划.docx
